Gait Optimization for Legged Systems Through Mixed Distribution Cross-Entropy Optimization
作者: Ioannis Tsikelis, Konstantinos Chatzilygeroudis
分类: cs.RO, eess.SY
发布日期: 2024-10-03
备注: 8 pages, 7 figures, Accepted at Humanoids 2024
💡 一句话要点
提出CrEGOpt,一种基于混合分布交叉熵优化的腿式机器人步态优化方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 腿式机器人 步态优化 轨迹优化 交叉熵方法 双层优化
📋 核心要点
- 腿式机器人步态规划面临动态复杂和优化变量众多的挑战,传统轨迹优化方法难以有效解决非线性问题。
- CrEGOpt采用双层优化,上层使用混合分布交叉熵优化步态序列和相位,简化下层轨迹优化。
- 实验证明CrEGOpt能在10秒内为多种腿式机器人找到步态解决方案,为自动接触调度提供新方向。
📝 摘要(中文)
腿式机器人系统因其卓越的承载能力、增强的自主性和在不平坦地形上的有效导航能力,在现实世界应用中发挥着重要作用。它们在移动性和有效载荷能力之间提供了最佳的折衷方案,在各种环境中表现出色,同时保持了运输重物的效率。然而,由于其动态运动的复杂性和所涉及的众多优化变量,规划和优化这些机器人的步态和步态序列提出了重大挑战。传统的轨迹优化方法通过将问题表述为优化任务来应对这些挑战,旨在最小化成本函数,并自动发现接触序列。尽管它们的方法结构化,但基于优化的方法面临着巨大的困难,特别是因为这种公式会导致高度非线性和难以解决的问题。为了解决这些局限性,我们提出了一种双层优化方法CrEGOpt,它将传统的轨迹优化与黑盒优化方案相结合。CrEGOpt在高层采用混合分布交叉熵方法来优化步态序列和相位持续时间,从而简化了低层轨迹优化问题。这种方法可以快速解决复杂的步态优化问题。在模拟环境中的广泛评估表明,CrEGOpt可以在10秒内为双足、四足和六足机器人找到解决方案。这种新颖的双层优化方案为未来自动接触调度研究提供了一个有希望的方向。
🔬 方法详解
问题定义:论文旨在解决腿式机器人步态规划与优化问题,尤其是在动态运动复杂和优化变量众多的情况下,传统轨迹优化方法面临非线性、难以求解的问题。现有方法难以快速有效地找到最优或近似最优的步态序列和相位持续时间。
核心思路:论文的核心思路是将步态优化问题分解为双层优化结构。上层优化步态序列和相位持续时间,下层进行轨迹优化。通过上层对步态序列和相位的优化,降低了下层轨迹优化的复杂性,从而加速了整体优化过程。
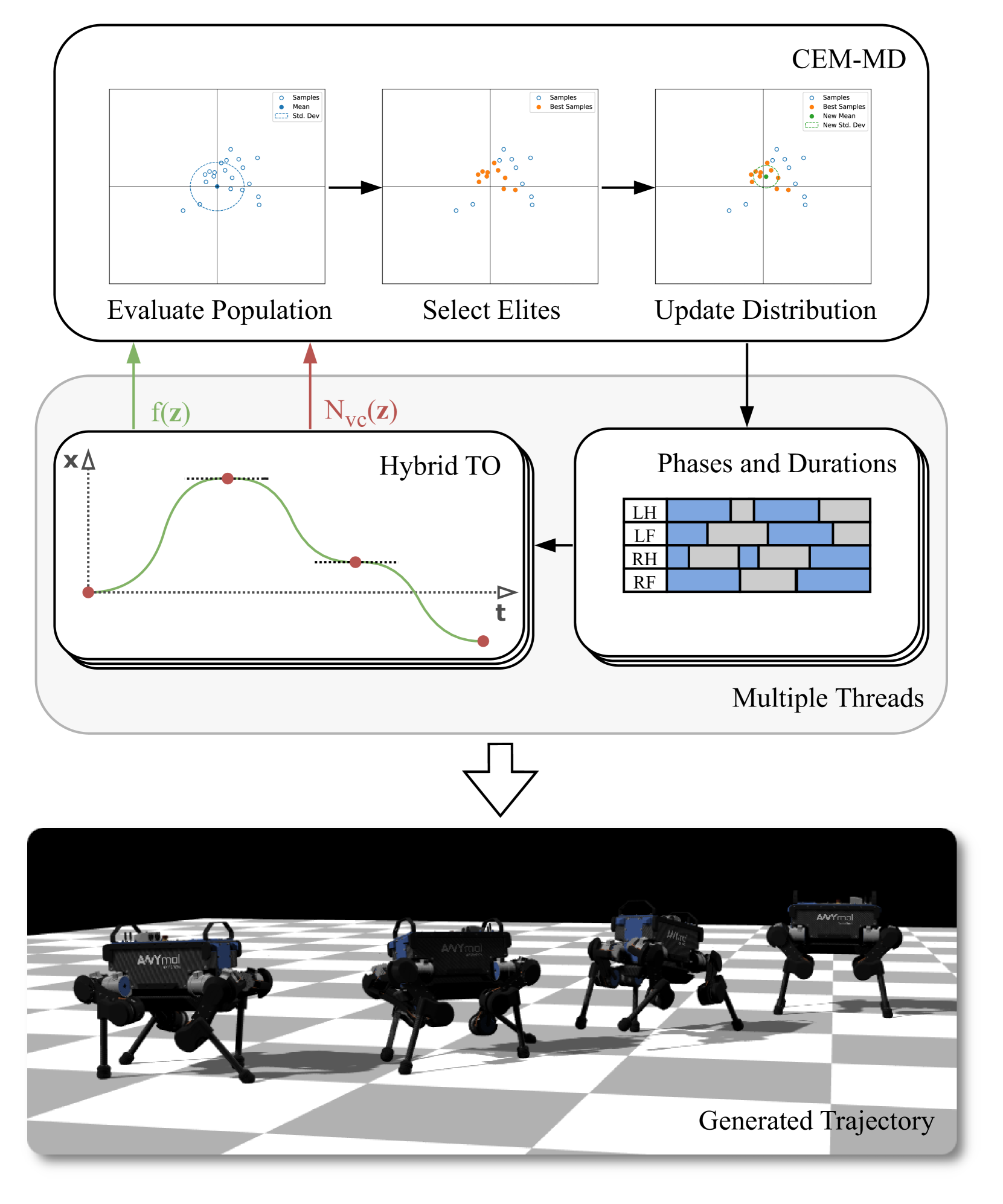
技术框架:CrEGOpt 采用双层优化框架。上层使用混合分布交叉熵方法 (Mixed Distribution Cross-Entropy Method) 优化步态序列和相位持续时间。下层使用传统的轨迹优化方法,例如直接搭配法 (Direct Collocation) 或其他基于优化的方法,根据上层提供的步态序列和相位持续时间,优化机器人的关节轨迹和控制力。上下层之间通过迭代优化,最终得到优化的步态。
关键创新:该方法的主要创新在于将混合分布交叉熵方法应用于步态序列和相位持续时间的优化。传统的轨迹优化方法通常需要手动设计步态序列或使用复杂的启发式算法,而CrEGOpt通过黑盒优化方法自动搜索最优的步态序列,避免了手动设计的繁琐和启发式算法的局限性。
关键设计:混合分布交叉熵方法 (Mixed Distribution Cross-Entropy Method) 的具体实现细节未知,但通常包括以下步骤:1) 初始化一个步态序列和相位持续时间的分布;2) 从该分布中采样多个候选步态;3) 使用下层轨迹优化器评估每个候选步态的性能;4) 根据性能选择表现最好的步态,并更新分布;5) 重复步骤2-4,直到收敛。损失函数的设计需要考虑步态的稳定性、能量效率和运动平滑性等因素。具体参数设置未知。
🖼️ 关键图片

📊 实验亮点
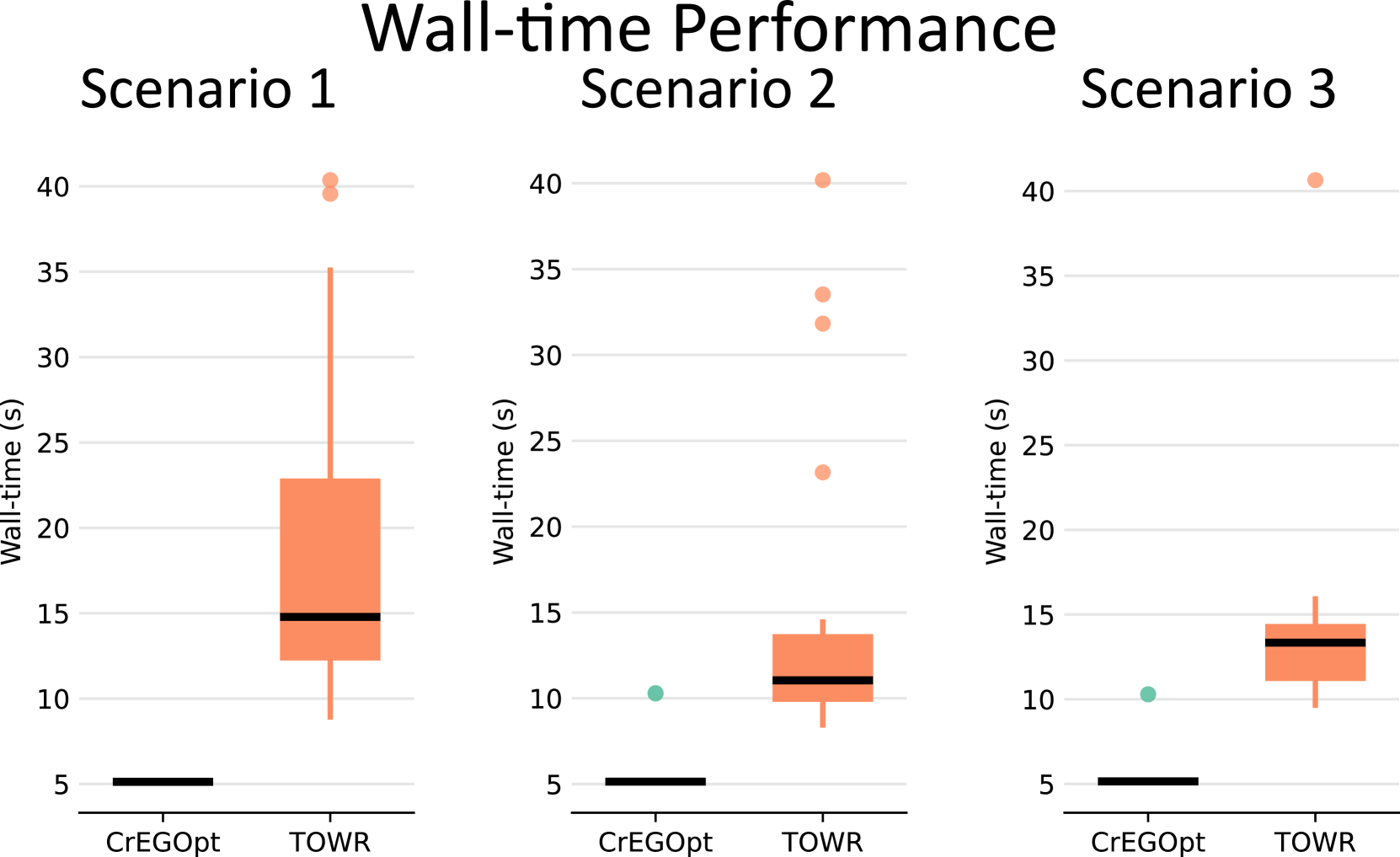
实验结果表明,CrEGOpt 能够在 10 秒内为双足、四足和六足机器人找到可行的步态解决方案。虽然论文中没有提供与具体基线的定量对比数据,但强调了该方法在快速解决复杂步态优化问题方面的优势。该方法能够自动发现步态序列,无需手动设计,显著提高了步态规划的效率。
🎯 应用场景
该研究成果可应用于各种腿式机器人,例如双足、四足和六足机器人,使其能够在复杂地形上高效稳定地行走。潜在应用领域包括搜救、物流运输、巡检维护等。通过自动优化步态,可以显著提高机器人的自主性和适应性,降低人工干预的需求,并提升其在实际应用中的性能。
📄 摘要(原文)
Legged robotic systems can play an important role in real-world applications due to their superior load-bearing capabilities, enhanced autonomy, and effective navigation on uneven terrain. They offer an optimal trade-off between mobility and payload capacity, excelling in diverse environments while maintaining efficiency in transporting heavy loads. However, planning and optimizing gaits and gait sequences for these robots presents significant challenges due to the complexity of their dynamic motion and the numerous optimization variables involved. Traditional trajectory optimization methods address these challenges by formulating the problem as an optimization task, aiming to minimize cost functions, and to automatically discover contact sequences. Despite their structured approach, optimization-based methods face substantial difficulties, particularly because such formulations result in highly nonlinear and difficult to solve problems. To address these limitations, we propose CrEGOpt, a bi-level optimization method that combines traditional trajectory optimization with a black-box optimization scheme. CrEGOpt at the higher level employs the Mixed Distribution Cross-Entropy Method to optimize both the gait sequence and the phase durations, thus simplifying the lower level trajectory optimization problem. This approach allows for fast solutions of complex gait optimization problems. Extensive evaluation in simulated environments demonstrates that CrEGOpt can find solutions for biped, quadruped, and hexapod robots in under 10 seconds. This novel bi-level optimization scheme offers a promising direction for future research in automatic contact scheduling.