Custom Non-Linear Model Predictive Control for Obstacle Avoidance in Indoor and Outdoor Environments
作者: Lara Laban, Mariusz Wzorek, Piotr Rudol, Tommy Persson
分类: cs.RO, cs.AI, cs.AR, cs.CE, eess.SY
发布日期: 2024-10-03
备注: This manuscript has 7 pages and 8 figures, detailing NMPC for UAV obstacle avoidance using DJI UAVs. It features simulations, experimental results, and uses CasADi for optimization with ROS integration. Code and media at https://github.com/larasupernovae/nmpc_flash_multi_obstacle
💡 一句话要点
提出基于非线性模型预测控制的无人机避障方法,适用于室内外复杂环境。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机 非线性模型预测控制 自主导航 轨迹跟踪 障碍物规避 B样条曲线 实时优化
📋 核心要点
- 无人机在复杂环境中的轨迹跟踪和避障面临非线性动力学挑战,现有线性近似方法难以满足需求。
- 本文提出基于动态模型的非线性模型预测控制框架,结合B样条轨迹生成和惩罚代价函数,提升控制精度。
- 通过仿真和室内外实验验证了该NMPC框架的有效性,实现了平滑、无碰撞的自主导航。
📝 摘要(中文)
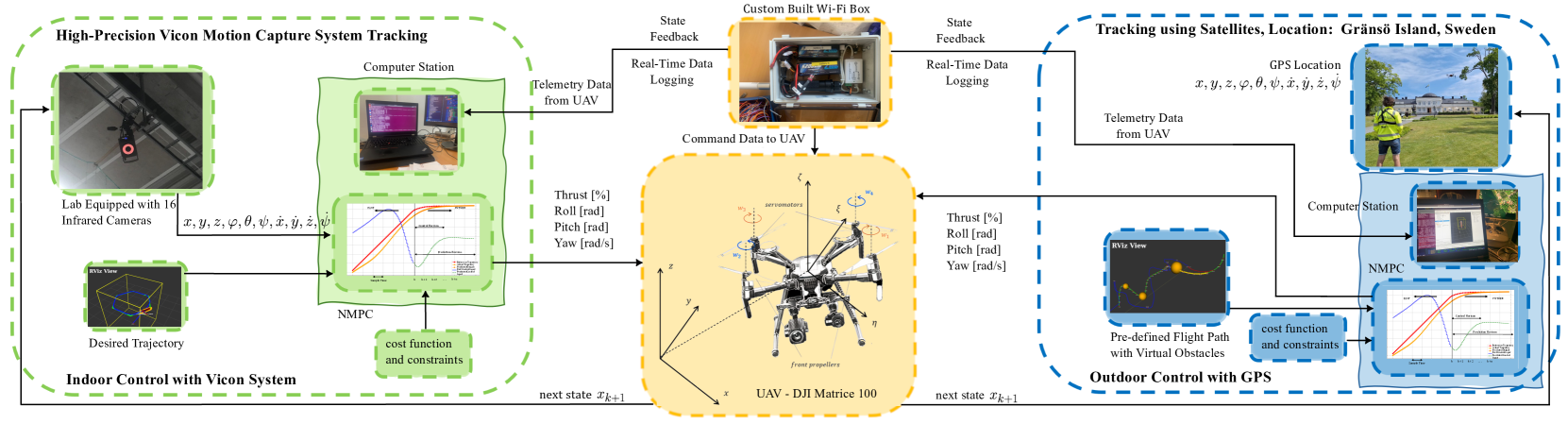
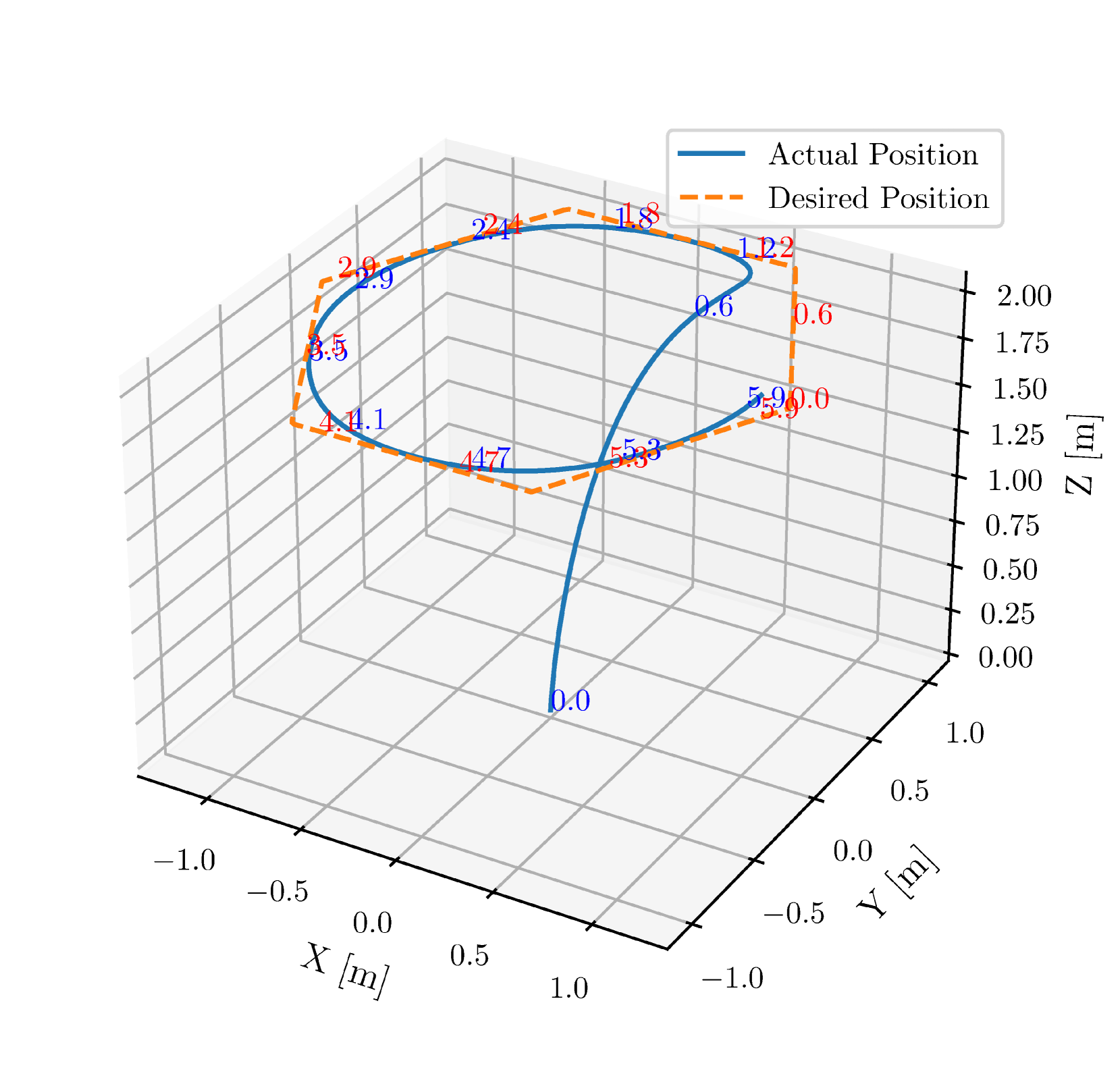
本文提出了一种用于DJI Matrice 100的非线性模型预测控制(NMPC)框架,旨在解决无人机在复杂环境中进行轨迹跟踪和避障时,因非线性动力学带来的挑战。该框架利用动态模型和B样条插值生成平滑的参考轨迹,确保在满足安全约束的同时,实现最小的偏差。该框架支持多种轨迹类型,并采用基于惩罚的代价函数来提高控制精度,尤其是在执行精细动作时。该框架利用CasADi进行高效的实时优化,使无人机即使在计算资源受限的情况下也能保持稳健运行。仿真和真实世界的室内外实验表明,NMPC能够适应扰动,实现平滑、无碰撞的导航。
🔬 方法详解
问题定义:无人机在复杂环境中自主导航,尤其是在障碍物密集的场景下,需要精确的轨迹跟踪和避障能力。现有的控制策略,如线性模型预测控制,在处理无人机的非线性动力学时存在局限性,难以保证在各种工况下的鲁棒性和精度。因此,需要一种能够有效处理非线性动力学,并能在计算资源有限的情况下实时运行的控制方法。
核心思路:本文的核心思路是利用非线性模型预测控制(NMPC)直接处理无人机的非线性动力学,通过预测未来一段时间内的状态,并优化控制输入,从而实现精确的轨迹跟踪和避障。B样条插值用于生成平滑的参考轨迹,减少控制输入的突变,提高系统的稳定性。惩罚代价函数用于约束控制输入和状态,确保满足安全约束。
技术框架:该NMPC框架主要包含以下几个模块:1) 轨迹生成模块:使用B样条插值生成平滑的参考轨迹。2) 动力学模型模块:建立无人机的非线性动力学模型,用于预测未来状态。3) 优化模块:使用CasADi优化工具箱,基于代价函数和约束条件,求解最优控制输入。4) 控制执行模块:将优化后的控制输入发送给无人机,控制其运动。整个流程是:首先生成参考轨迹,然后利用动力学模型预测未来状态,接着通过优化模块求解最优控制输入,最后将控制输入发送给无人机执行。
关键创新:该论文的关键创新在于将非线性模型预测控制应用于无人机的自主导航,并结合B样条轨迹生成和惩罚代价函数,提高了控制精度和鲁棒性。与传统的线性模型预测控制相比,该方法能够更准确地处理无人机的非线性动力学,从而在复杂环境中实现更可靠的自主导航。此外,使用CasADi优化工具箱实现了高效的实时优化,使得该方法能够在计算资源有限的情况下运行。
关键设计:代价函数的设计是关键。代价函数通常包含三部分:轨迹跟踪误差、控制输入和障碍物规避惩罚。轨迹跟踪误差用于衡量无人机与参考轨迹之间的偏差;控制输入用于限制控制输入的幅度,避免控制饱和;障碍物规避惩罚用于避免无人机与障碍物发生碰撞。B样条曲线的控制点数量和位置也会影响轨迹的平滑度和精度。此外,优化算法的选择和参数设置也会影响优化速度和结果。
🖼️ 关键图片

📊 实验亮点
仿真和真实世界的室内外实验验证了该NMPC框架的有效性。实验结果表明,该方法能够实现平滑、无碰撞的自主导航,并能够有效地适应扰动。具体的性能数据(例如,轨迹跟踪误差、避障成功率等)和与基线方法的对比结果(例如,线性MPC)未在摘要中明确给出,属于未知信息。
🎯 应用场景
该研究成果可广泛应用于无人机的自主导航、智能巡检、物流配送、环境监测等领域。尤其是在复杂、动态的室内外环境中,该方法能够提高无人机的自主性和安全性,降低人工干预的需求。未来,该方法有望进一步扩展到多无人机协同控制、人机协作等更高级的应用场景。
📄 摘要(原文)
Navigating complex environments requires Unmanned Aerial Vehicles (UAVs) and autonomous systems to perform trajectory tracking and obstacle avoidance in real-time. While many control strategies have effectively utilized linear approximations, addressing the non-linear dynamics of UAV, especially in obstacle-dense environments, remains a key challenge that requires further research. This paper introduces a Non-linear Model Predictive Control (NMPC) framework for the DJI Matrice 100, addressing these challenges by using a dynamic model and B-spline interpolation for smooth reference trajectories, ensuring minimal deviation while respecting safety constraints. The framework supports various trajectory types and employs a penalty-based cost function for control accuracy in tight maneuvers. The framework utilizes CasADi for efficient real-time optimization, enabling the UAV to maintain robust operation even under tight computational constraints. Simulation and real-world indoor and outdoor experiments demonstrated the NMPC ability to adapt to disturbances, resulting in smooth, collision-free navigation.