E2H: A Two-Stage Non-Invasive Neural Signal Driven Humanoid Robotic Whole-Body Control Framework
作者: Yiqun Duan, Qiang Zhang, Jinzhao Zhou, Jingkai Sun, Xiaowei Jiang, Jiahang Cao, Jiaxu Wang, Yiqian Yang, Wen Zhao, Gang Han, Yijie Guo, Chin-Teng Lin
分类: cs.RO, cs.HC
发布日期: 2024-10-03 (更新: 2024-10-14)
💡 一句话要点
E2H:提出一种基于非侵入式脑电信号的人形机器人全身控制两阶段框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱四:生成式动作 (Generative Motion)
关键词: 脑机接口 人形机器人 脑电信号 运动控制 大型语言模型
📋 核心要点
- 现有的人形机器人控制方法在人机交互方面探索不足,尤其是在直接使用大脑信号控制机器人方面。
- E2H框架的核心思想是将脑电信号解码为语义运动关键词,再利用LLM生成运动,并结合运动模仿控制策略。
- 该方法为在言语指令受限的场景下的人机协作提供了可能,例如言语障碍、太空或水下探索。
📝 摘要(中文)
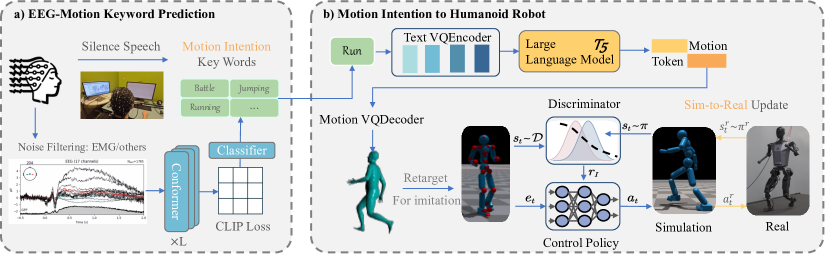
本文提出了一种名为E2H的创新框架,该框架率先使用高频非侵入式神经信号控制人形机器人。考虑到非侵入式信号在解码精确空间轨迹方面的质量较低,E2H框架创新性地分解为两个阶段:1)将神经信号(脑电图EEG)解码为语义运动关键词;2)利用大型语言模型(LLM)辅助的运动生成,结合精确的运动模仿控制策略,实现人形机器人的控制。这种直接通过脑电波指令驱动机器人的方法,为人机协作提供了一种新颖的途径,尤其是在言语指令不切实际的情况下,例如言语障碍、太空探索或水下探索等,从而释放了巨大的潜力。E2H为未来提供了一个令人兴奋的视角,在人机交互方面具有巨大的潜力。
🔬 方法详解
问题定义:论文旨在解决如何使用非侵入式脑电信号有效控制人形机器人的问题。现有方法主要依赖于语音或手动控制,在某些特殊场景下(如言语障碍、水下环境等)存在局限性。直接解码脑电信号控制机器人面临的挑战在于非侵入式脑电信号质量较低,难以精确解码空间轨迹。
核心思路:论文的核心思路是将复杂的机器人控制任务分解为两个阶段:首先,将脑电信号解码为高级的语义运动关键词,降低了对脑电信号精确度的要求;其次,利用大型语言模型(LLM)的强大生成能力,根据这些关键词生成具体的机器人运动序列,并使用运动模仿控制策略保证运动的精确执行。
技术框架:E2H框架包含两个主要阶段:1) 脑电信号解码阶段:该阶段负责将脑电信号转化为语义运动关键词。具体实现方式未知,但推测可能使用了机器学习或深度学习模型进行分类或回归。2) 运动生成与控制阶段:该阶段利用LLM根据运动关键词生成详细的机器人运动轨迹,并使用运动模仿控制策略驱动机器人执行这些运动。运动模仿控制策略的具体细节未知,但其目标是使机器人尽可能精确地复现LLM生成的运动轨迹。
关键创新:该论文的关键创新在于将脑电信号控制与LLM运动生成相结合,形成一个两阶段的控制框架。这种方法降低了对脑电信号解码精度的要求,同时利用了LLM的强大生成能力,使得使用非侵入式脑电信号控制复杂的人形机器人成为可能。与直接解码脑电信号控制机器人相比,该方法更加稳健和可行。
关键设计:论文中关于脑电信号解码的具体方法、LLM的选择和使用方式、以及运动模仿控制策略的细节描述不足。这些是影响E2H框架性能的关键设计要素,需要进一步的研究和实验来确定最佳的参数设置、损失函数和网络结构。
🖼️ 关键图片
📊 实验亮点
由于论文摘要中没有提供具体的实验结果和性能数据,因此无法总结实验亮点。需要查阅论文全文才能了解E2H框架的具体性能表现,例如脑电信号解码的准确率、LLM生成运动的质量、以及机器人运动控制的精度等。
🎯 应用场景
E2H框架在多个领域具有潜在的应用价值。例如,它可以帮助言语障碍人士通过脑电信号控制机器人完成日常任务;在太空或水下探索等危险环境中,操作人员可以通过脑电信号远程控制机器人进行作业;此外,该技术还可以应用于康复医疗领域,帮助患者恢复运动能力。E2H为未来人机交互提供了一种全新的模式,具有广阔的应用前景。
📄 摘要(原文)
Recent advancements in humanoid robotics, including the integration of hierarchical reinforcement learning-based control and the utilization of LLM planning, have significantly enhanced the ability of robots to perform complex tasks. In contrast to the highly developed humanoid robots, the human factors involved remain relatively unexplored. Directly controlling humanoid robots with the brain has already appeared in many science fiction novels, such as Pacific Rim and Gundam. In this work, we present E2H (EEG-to-Humanoid), an innovative framework that pioneers the control of humanoid robots using high-frequency non-invasive neural signals. As the none-invasive signal quality remains low in decoding precise spatial trajectory, we decompose the E2H framework in an innovative two-stage formation: 1) decoding neural signals (EEG) into semantic motion keywords, 2) utilizing LLM facilitated motion generation with a precise motion imitation control policy to realize humanoid robotics control. The method of directly driving robots with brainwave commands offers a novel approach to human-machine collaboration, especially in situations where verbal commands are impractical, such as in cases of speech impairments, space exploration, or underwater exploration, unlocking significant potential. E2H offers an exciting glimpse into the future, holding immense potential for human-computer interaction.