Computational Teaching for Driving via Multi-Task Imitation Learning
作者: Deepak Gopinath, Xiongyi Cui, Jonathan DeCastro, Emily Sumner, Jean Costa, Hiroshi Yasuda, Allison Morgan, Laporsha Dees, Sheryl Chau, John Leonard, Tiffany Chen, Guy Rosman, Avinash Balachandran
分类: cs.RO
发布日期: 2024-10-02
备注: 12 pages, 3 figures, 3 tables
💡 一句话要点
提出基于多任务模仿学习的计算教学方法,用于高性能驾驶技能自动教学。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 多任务学习 模仿学习 自动驾驶教学 人机交互 驾驶技能训练
📋 核心要点
- 专业驾驶教学依赖专家指导,但专家资源有限,难以满足需求,因此需要自动驾驶教学系统。
- 利用多任务模仿学习,从易获取的非交互式驾驶数据中学习,提升模型在教学指令预测方面的鲁棒性。
- 实验表明,该系统能有效提升学员的驾驶技能,并获得学员在有用性和满意度方面的好评。
📝 摘要(中文)
本文提出了一种基于多任务模仿学习(MTIL)范式的自动教学系统,用于高性能驾驶等复杂运动技能的教学。由于高质量的专家教师和学生互动数据集难以大规模收集,该方法利用MTIL,通过来自更容易获取的非交互式人类驾驶数据集的自监督训练信号,学习鲁棒的表征。通过半合成数据集、专业赛道驾驶教学数据集、赛车模拟器人机实验以及真实赛道车辆演示验证了该方法。实验表明,合适的辅助机器学习任务能够提升教学指令预测的性能。此外,人机实验表明,接受该教学系统指导的学生在保持赛道内行驶的能力有所提高,并且对模型的交互在有用性和满意度方面表现出良好的评价。
🔬 方法详解
问题定义:论文旨在解决高性能驾驶等复杂运动技能教学中,高质量教学数据难以获取的问题。现有方法依赖大量专家教师和学生互动数据,成本高昂,限制了自动教学系统的发展。
核心思路:论文的核心思路是利用多任务模仿学习(MTIL),从更容易获取的非交互式人类驾驶数据中学习。通过引入自监督学习任务,模型可以学习到更鲁棒的驾驶行为表征,从而提升在教学任务上的泛化能力。这样,即使缺乏大量的专家教学数据,也能训练出有效的自动教学系统。
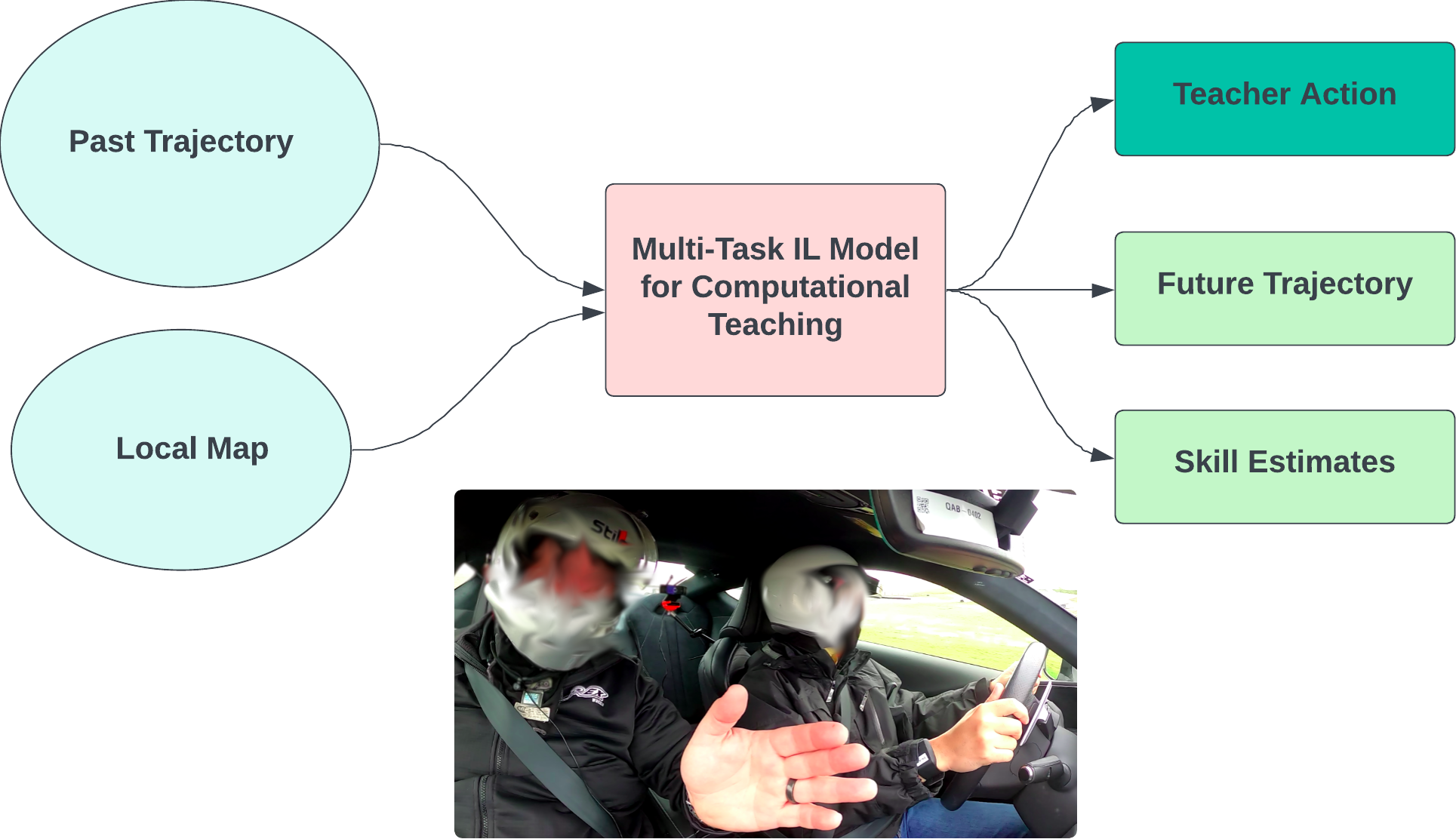
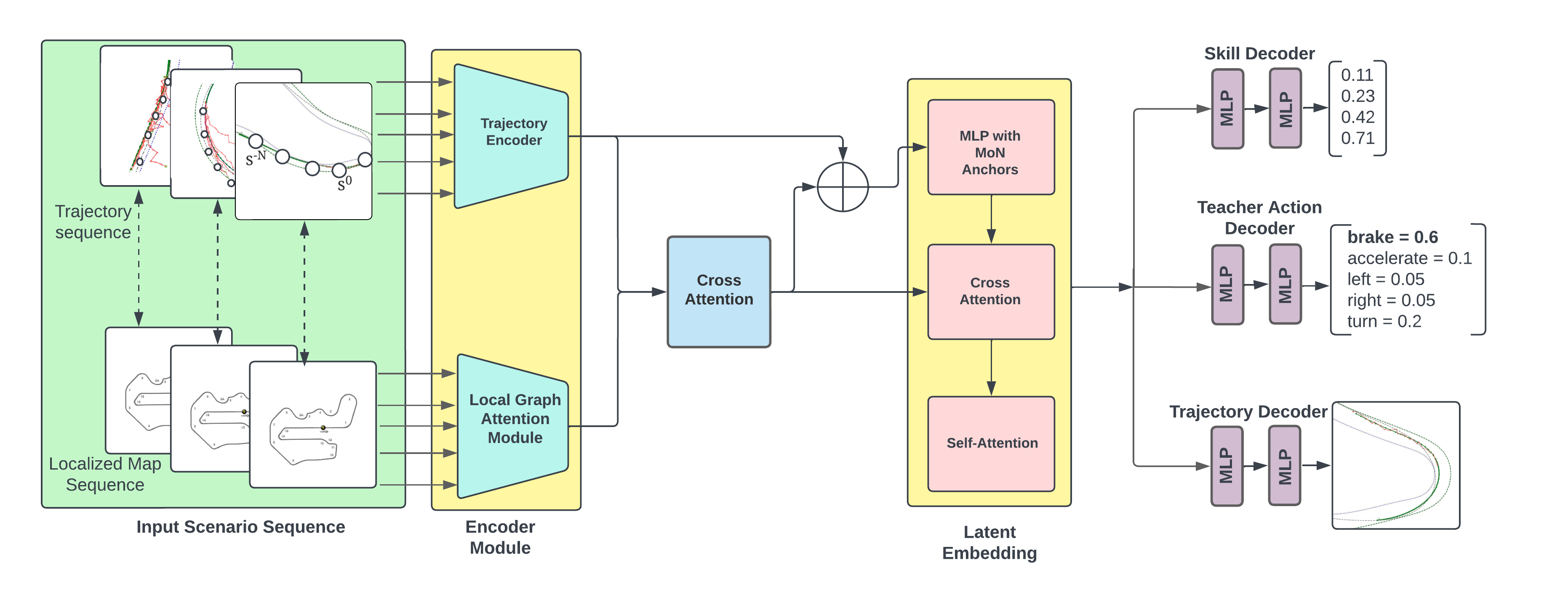
技术框架:整体框架包含以下几个主要模块:1) 数据收集模块:收集真实人类驾驶数据,包括专业赛道驾驶数据和普通驾驶数据。2) 多任务模仿学习模型:该模型以驾驶数据为输入,同时学习多个任务,包括驾驶行为预测、状态估计等。3) 教学指令生成模块:基于学习到的驾驶行为表征,生成针对学生的教学指令。4) 人机交互模块:将教学指令传递给学生,并收集学生的反馈。
关键创新:该论文的关键创新在于将多任务模仿学习应用于自动驾驶教学领域。通过引入辅助的自监督学习任务,模型可以从非交互式数据中学习到有用的信息,从而克服了教学数据稀缺的问题。此外,该方法还考虑了人机交互的因素,通过收集学生的反馈来优化教学策略。
关键设计:论文中,多任务模仿学习模型采用了深度神经网络结构,包括卷积神经网络(CNN)和循环神经网络(RNN)。CNN用于提取图像特征,RNN用于处理时间序列数据。损失函数包括模仿学习损失和自监督学习损失。模仿学习损失用于衡量模型预测的驾驶行为与真实驾驶行为之间的差距,自监督学习损失用于鼓励模型学习到更鲁棒的表征。具体的参数设置和网络结构细节在论文中有详细描述。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在半合成数据集、专业赛道驾驶教学数据集和赛车模拟器人机实验中均取得了良好的效果。在人机实验中,接受该教学系统指导的学生在保持赛道内行驶的能力显著提高,并且对模型的交互在有用性和满意度方面表现出良好的评价。具体而言,学生在赛道内行驶的时间平均提高了15%,并且对教学系统的满意度评分达到了4.5分(满分5分)。
🎯 应用场景
该研究成果可应用于驾驶培训、赛车训练、以及其他需要个性化指导的运动技能学习领域。通过自动化的教学系统,可以降低学习成本,提高学习效率,并为更多人提供高质量的教学资源。未来,该技术有望扩展到其他复杂技能的学习,例如手术操作、音乐演奏等。
📄 摘要(原文)
Learning motor skills for sports or performance driving is often done with professional instruction from expert human teachers, whose availability is limited. Our goal is to enable automated teaching via a learned model that interacts with the student similar to a human teacher. However, training such automated teaching systems is limited by the availability of high-quality annotated datasets of expert teacher and student interactions that are difficult to collect at scale. To address this data scarcity problem, we propose an approach for training a coaching system for complex motor tasks such as high performance driving via a Multi-Task Imitation Learning (MTIL) paradigm. MTIL allows our model to learn robust representations by utilizing self-supervised training signals from more readily available non-interactive datasets of humans performing the task of interest. We validate our approach with (1) a semi-synthetic dataset created from real human driving trajectories, (2) a professional track driving instruction dataset, (3) a track-racing driving simulator human-subject study, and (4) a system demonstration on an instrumented car at a race track. Our experiments show that the right set of auxiliary machine learning tasks improves performance in predicting teaching instructions. Moreover, in the human subjects study, students exposed to the instructions from our teaching system improve their ability to stay within track limits, and show favorable perception of the model's interaction with them, in terms of usefulness and satisfaction.