Additively Manufactured Open-Source Quadruped Robots for Multi-Robot SLAM Applications
作者: Zachary Fuge, Benjamin Beiter, Alexander Leonessa
分类: cs.RO
发布日期: 2024-09-30
💡 一句话要点
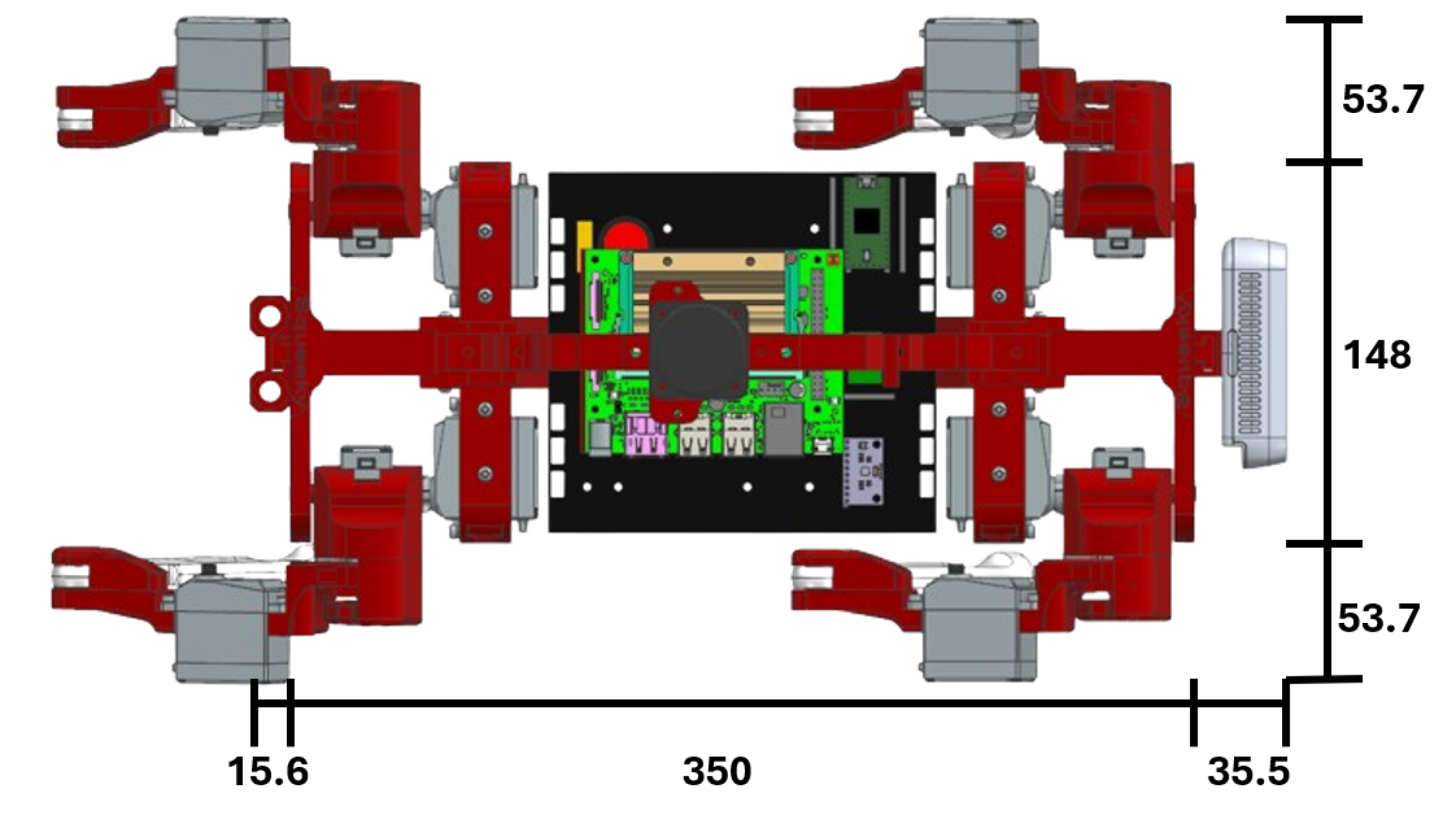
设计开源增材制造四足机器人Squeaky,用于多机器人SLAM研究
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 四足机器人 多机器人SLAM 开源机器人 增材制造 机器人集群
📋 核心要点
- 多机器人SLAM研究成本高昂,缺乏经济实惠且易于扩展的机器人平台。
- 设计开源四足机器人Squeaky,硬件软件可定制,支持多机器人协同建图。
- Squeaky旨在为SLAM、计算机视觉和强化学习提供低成本、可扩展的研究平台。
📝 摘要(中文)
本文介绍了四足机器人Squeaky的设计与开发,旨在为单机器人和多机器人SLAM、计算机视觉以及强化学习提供一个研究和学习平台。随着机器人数量的增加,多机器人应用对低成本机器人的需求日益增长。SLAM对于机器人感知环境和定位至关重要,可应用于洞穴探索、灾难救援和远程检查等领域。为了提高效率,可以使用机器人集群进行多机器人SLAM,合并地图。Squeaky是一款经济实惠的四足机器人,其硬件和软件易于调整,能够通过共享网络创建多个机器人合并的地图,并以开源形式提供给研究社区。
🔬 方法详解
问题定义:现有的多机器人SLAM研究往往受限于机器人平台的成本。当机器人数量增加时,总成本会呈指数级增长,这使得大规模多机器人系统的研究变得困难。此外,缺乏易于定制和扩展的开源机器人平台也阻碍了该领域的发展。
核心思路:本文的核心思路是设计一款经济实惠、易于制造和定制的四足机器人平台,并将其开源,从而降低多机器人SLAM研究的门槛。通过提供一个低成本的硬件平台和灵活的软件架构,研究人员可以更容易地进行多机器人协同建图、计算机视觉和强化学习等方面的研究。
技术框架:Squeaky的整体框架包括以下几个主要模块:1) 机器人本体设计:采用增材制造技术,降低制造成本,并提供可定制的硬件接口。2) 运动控制系统:实现机器人的稳定行走和运动控制。3) SLAM算法:集成常用的SLAM算法,实现机器人在未知环境中的定位和建图。4) 多机器人通信:建立机器人之间的通信网络,实现地图信息的共享和融合。5) 开源软件库:提供丰富的API和示例代码,方便用户进行二次开发。
关键创新:Squeaky的关键创新在于其低成本、开源和可定制的特性。与其他商业机器人平台相比,Squeaky的制造成本更低,且用户可以根据自己的需求修改硬件和软件。此外,Squeaky的开源特性促进了研究社区的合作和知识共享。
关键设计:Squeaky的关键设计包括:1) 采用增材制造技术,使用常见的3D打印材料,降低制造成本。2) 使用开源的机器人操作系统(ROS)作为软件框架,方便用户进行二次开发。3) 提供可定制的硬件接口,方便用户添加传感器和执行器。4) 设计模块化的软件架构,方便用户集成不同的SLAM算法和控制策略。
🖼️ 关键图片


📊 实验亮点
论文重点在于Squeaky的设计和开发,而非具体的实验结果。但文中提到Squeaky能够通过共享网络创建多个机器人合并的地图,这表明其具备多机器人SLAM的基本功能。由于是开源项目,其性能和应用潜力将取决于社区的贡献和进一步开发。
🎯 应用场景
Squeaky具有广泛的应用前景,包括:1) 多机器人SLAM研究:为研究人员提供一个低成本、可扩展的平台,用于开发和测试新的多机器人SLAM算法。2) 灾难救援:在危险环境中部署机器人集群,进行搜索和救援任务。3) 洞穴探索:利用机器人集群绘制地下洞穴地图。4) 远程检查:在工业环境中部署机器人集群,进行设备维护和安全检查。Squeaky的开源特性将促进机器人技术的普及和发展。
📄 摘要(原文)
This work presents the design and development of the quadruped robot Squeaky to be used as a research and learning platform for single and multi-SLAM robotics, computer vision, and reinforcement learning. Affordable robots are becoming necessary when expanding from single to multi-robot applications, as the cost can increase exponentially as fleet size increases. SLAM is essential for a robot to perceive and localize within its environment to perform applications such as cave exploration, disaster assistance, and remote inspection. For improved efficiency, a fleet of robots can be employed to combine maps for multi-robot SLAM. Squeaky is an affordable quadrupedal robot, designed to have easily adaptable hardware and software, capable of creating a merged map under a shared network from multiple robots, and available open-source for the benefit of the research community.