Towards Effective Utilization of Mixed-Quality Demonstrations in Robotic Manipulation via Segment-Level Selection and Optimization
作者: Jingjing Chen, Hongjie Fang, Hao-Shu Fang, Cewu Lu
分类: cs.RO
发布日期: 2024-09-30 (更新: 2025-03-17)
备注: ICRA 2025. Project website: https://tonyfang.net/s2i/
💡 一句话要点
提出S2I框架,通过分段选择与优化,有效利用机器人操作中混合质量的演示数据。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人操作 模仿学习 混合质量数据 分段选择 轨迹优化
📋 核心要点
- 现有机器人操作数据集质量参差不齐,直接使用会影响策略学习效果,高质量数据收集成本高昂。
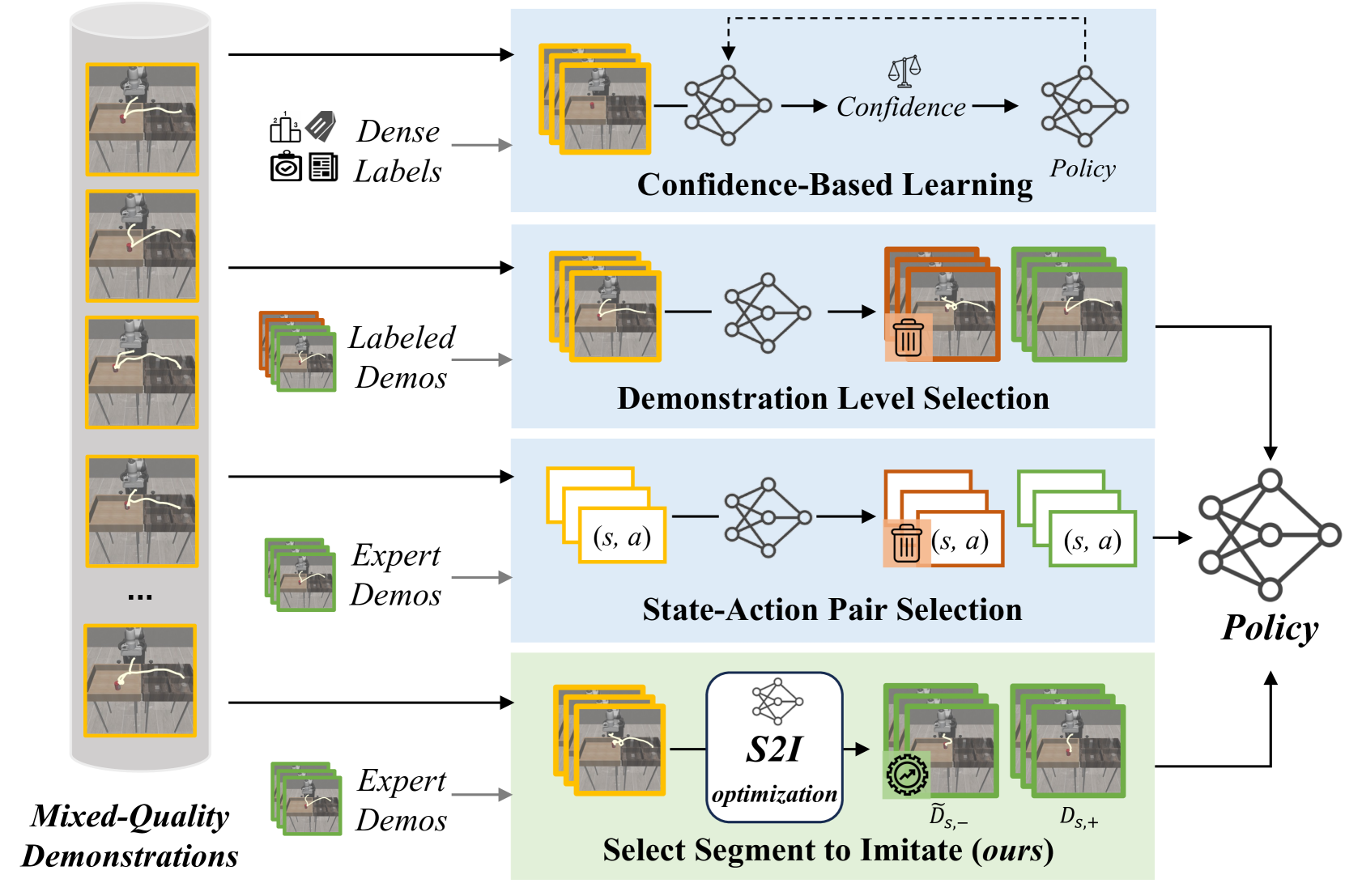
- S2I框架通过分段、选择和优化混合质量的演示数据,提升下游策略的学习效果,且易于集成。
- 实验表明,仅需少量专家数据,S2I即可显著提升各种下游策略在混合质量数据上的性能。
📝 摘要(中文)
数据对于机器人操作至关重要,它支撑着复杂任务机器人系统的发展。虽然高质量、多样化的数据集可以提高机器人操作策略的性能和适应性,但收集大量的专家级数据成本高昂。因此,由于操作员的差异,许多当前的数据集都存在质量不一致的问题,这突显了有效利用混合质量数据的必要性。为了缓解这些问题,我们提出了“选择分段进行模仿”(S2I)框架,该框架在分段级别选择和优化混合质量的演示数据,同时确保与现有机器人操作策略的即插即用兼容性。该框架包含三个组成部分:演示分割(将原始数据分成有意义的片段)、分段选择(使用对比学习来寻找高质量的片段)和轨迹优化(优化次优片段以更好地进行策略学习)。我们通过在模拟和真实环境中进行的六项任务的综合实验评估了S2I,结果表明,仅使用3个专家演示作为参考,S2I就可以提高各种下游策略在混合质量演示数据训练时的性能。项目网站:https://tonyfang.net/s2i/。
🔬 方法详解
问题定义:论文旨在解决机器人操作中,由于数据集质量不一致导致策略学习效果不佳的问题。现有方法要么依赖大量高质量数据,成本高昂;要么直接使用混合质量数据,导致策略性能下降。因此,如何有效利用混合质量数据成为一个关键挑战。
核心思路:论文的核心思路是将演示数据分割成片段,然后通过对比学习选择高质量的片段,并对次优片段进行优化,从而提高整体数据集的质量。这种方法能够在不增加数据收集成本的前提下,提升策略学习的效果。
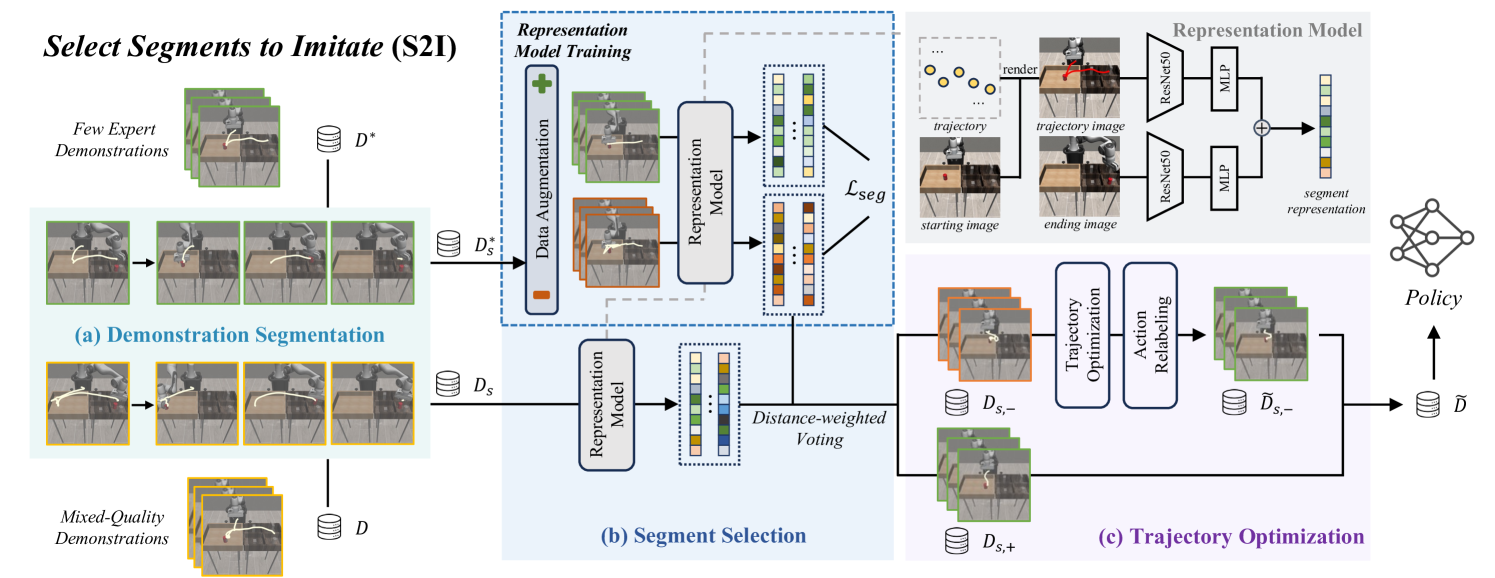
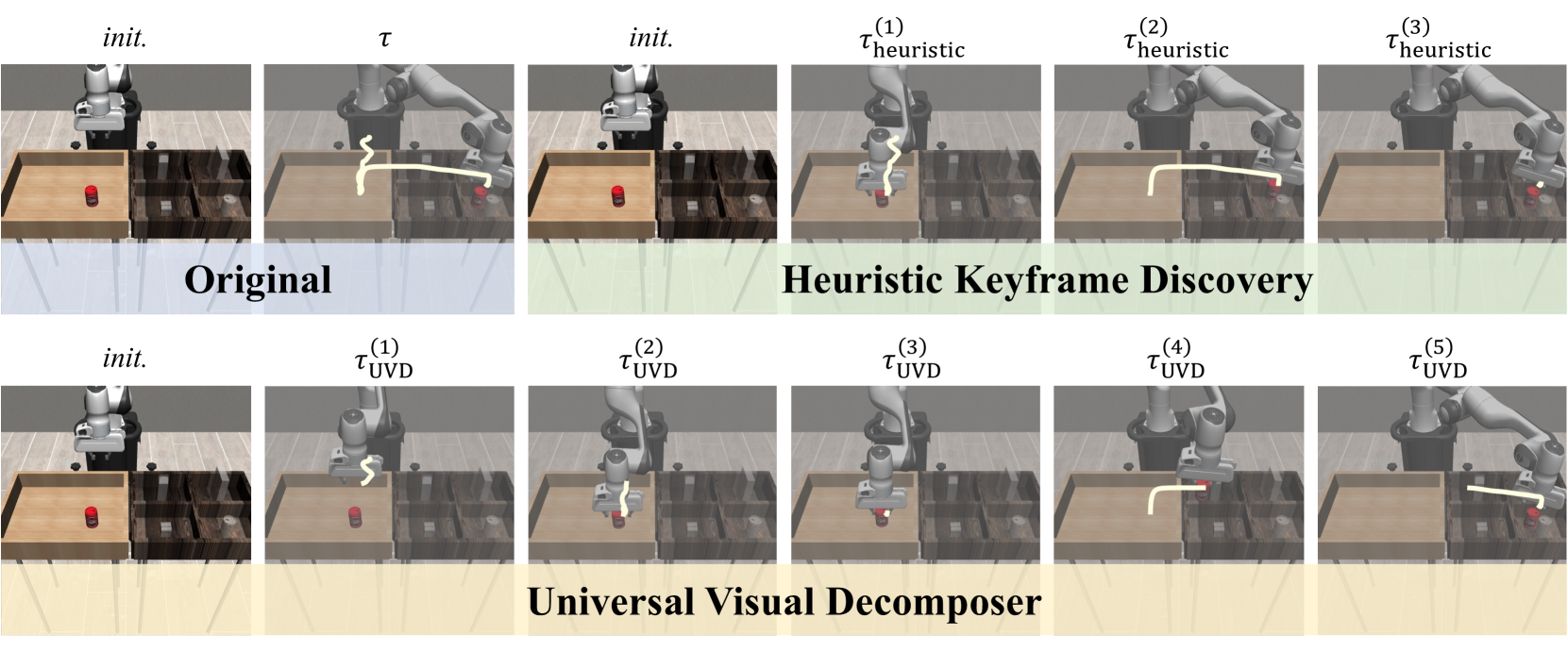
技术框架:S2I框架包含三个主要模块:1) 演示分割:将原始演示数据分割成有意义的片段。2) 分段选择:使用对比学习方法,从分割后的片段中选择高质量的片段。3) 轨迹优化:对选择出的次优片段进行优化,使其更符合专家演示的轨迹。整个框架可以与现有的机器人操作策略无缝集成,实现即插即用。
关键创新:S2I的关键创新在于其分段选择和优化策略。通过对比学习,能够有效地识别和选择高质量的片段,避免了直接使用低质量数据带来的负面影响。同时,轨迹优化模块能够进一步提升次优片段的质量,从而提高整体数据集的质量。
关键设计:在分段选择模块中,使用了对比学习损失函数,旨在拉近高质量片段之间的距离,同时推远高质量片段和低质量片段之间的距离。具体的网络结构和参数设置在论文中有详细描述,但此处未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,在六项不同的机器人操作任务中,S2I框架仅需3个专家演示作为参考,即可显著提升各种下游策略在混合质量数据上的性能。具体提升幅度未知,但实验证明了S2I框架在实际应用中的有效性。
🎯 应用场景
该研究成果可广泛应用于机器人操作领域,尤其是在数据收集成本较高或数据质量难以保证的场景下。例如,在医疗机器人、工业机器人等领域,可以利用S2I框架提升机器人操作的精度和可靠性,降低对高质量数据的依赖,加速机器人技术的落地应用。
📄 摘要(原文)
Data is crucial for robotic manipulation, as it underpins the development of robotic systems for complex tasks. While high-quality, diverse datasets enhance the performance and adaptability of robotic manipulation policies, collecting extensive expert-level data is resource-intensive. Consequently, many current datasets suffer from quality inconsistencies due to operator variability, highlighting the need for methods to utilize mixed-quality data effectively. To mitigate these issues, we propose "Select Segments to Imitate" (S2I), a framework that selects and optimizes mixed-quality demonstration data at the segment level, while ensuring plug-and-play compatibility with existing robotic manipulation policies. The framework has three components: demonstration segmentation dividing origin data into meaningful segments, segment selection using contrastive learning to find high-quality segments, and trajectory optimization to refine suboptimal segments for better policy learning. We evaluate S2I through comprehensive experiments in simulation and real-world environments across six tasks, demonstrating that with only 3 expert demonstrations for reference, S2I can improve the performance of various downstream policies when trained with mixed-quality demonstrations. Project website: https://tonyfang.net/s2i/.