SELP: Generating Safe and Efficient Task Plans for Robot Agents with Large Language Models
作者: Yi Wu, Zikang Xiong, Yiran Hu, Shreyash S. Iyengar, Nan Jiang, Aniket Bera, Lin Tan, Suresh Jagannathan
分类: cs.RO, cs.AI, cs.CL, cs.FL
发布日期: 2024-09-28 (更新: 2025-02-14)
备注: This paper has been accepted for presentation at the 2025 IEEE International Conference on Robotics and Automation (ICRA), May 19-23, 2025, Atlanta, USA, and for inclusion in the conference proceeding
💡 一句话要点
SELP:利用大语言模型为机器人生成安全高效的任务规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大语言模型 机器人规划 线性时序逻辑 约束解码 领域特定微调 安全规划 高效规划
📋 核心要点
- 现有方法难以保证LLM在复杂任务和长时程任务中生成符合用户约束的机器人任务规划。
- SELP通过等价投票保证LTL公式一致性,约束解码确保计划符合LTL,领域微调提升特定任务性能。
- 实验表明,SELP在无人机导航和机器人操作任务中,安全率和效率均优于现有方法。
📝 摘要(中文)
尽管大语言模型(LLMs)在增强机器人智能体理解和执行自然语言(NL)命令方面取得了显著进展,但确保智能体遵守用户指定的约束仍然具有挑战性,尤其是在处理复杂命令和长时程任务时。为了解决这一挑战,我们提出了三个关键见解:等价投票、约束解码和领域特定微调,这些方法显著提高了LLM规划器处理复杂任务的能力。等价投票通过从NL命令生成和采样多个线性时序逻辑(LTL)公式,对等价的LTL公式进行分组,并选择多数组公式作为最终LTL公式,从而确保一致性。约束解码然后使用生成的LTL公式来强制自回归推理计划,确保生成的计划符合LTL。领域特定微调定制LLM,以在特定任务领域内生成安全高效的计划。我们的方法,安全高效LLM规划器(SELP),结合了这些见解,创建了LLM规划器,以高置信度生成符合用户命令的计划。我们展示了SELP在不同机器人智能体和任务(包括无人机导航和机器人操作)中的有效性和通用性。对于无人机导航任务,SELP在安全率(即完成符合NL命令的任务)方面优于最先进的规划器10.8%,在计划效率方面优于19.8%。对于机器人操作任务,SELP在安全率方面实现了20.4%的改进。我们用于评估NL-to-LTL和机器人任务规划的数据集将在github.com/lt-asset/selp上发布。
🔬 方法详解
问题定义:论文旨在解决如何利用大语言模型为机器人生成既安全又高效的任务规划的问题。现有方法在处理复杂指令和长时程任务时,难以保证生成的计划能够完全符合用户指定的约束条件,存在安全隐患和效率低下的问题。
核心思路:论文的核心思路是结合等价投票、约束解码和领域特定微调三种技术,构建一个名为SELP(Safe Efficient LLM Planner)的LLM规划器。通过等价投票保证LTL公式的一致性,约束解码确保生成的计划符合LTL公式,领域特定微调则针对特定任务领域优化LLM的性能。
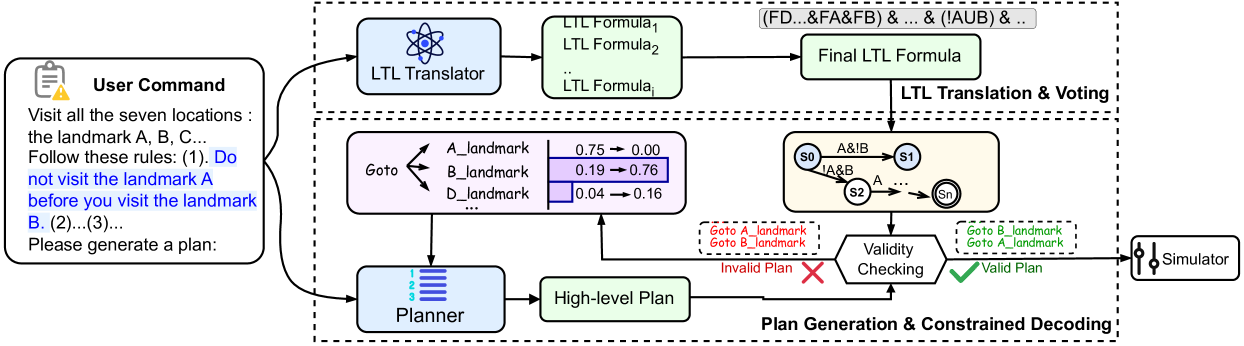
技术框架:SELP的整体框架包含以下几个主要阶段: 1. 自然语言到LTL公式转换:将用户输入的自然语言指令转换为线性时序逻辑(LTL)公式。 2. 等价投票:生成多个LTL公式,通过等价性判断进行分组,选择数量最多的组作为最终的LTL公式。 3. 约束解码:利用LTL公式约束LLM的自回归解码过程,确保生成的计划满足LTL公式的约束。 4. 领域特定微调:在特定任务领域的数据集上对LLM进行微调,以提高其在该领域的规划能力。
关键创新:论文的关键创新在于结合了等价投票、约束解码和领域特定微调三种技术,构建了一个完整的、可用于生成安全高效机器人任务规划的LLM规划器。等价投票机制有效地提高了LTL公式的准确性和一致性,约束解码则保证了生成的计划符合用户的约束条件。
关键设计: * 等价投票:通过生成多个LTL公式,并利用SMT求解器判断公式的等价性,从而选择最可靠的LTL公式。 * 约束解码:在LLM的解码过程中,使用LTL公式作为约束条件,过滤掉不符合约束的token,从而保证生成的计划满足LTL公式。 * 领域特定微调:使用特定任务领域的数据集对LLM进行微调,例如,使用无人机导航或机器人操作的数据集。
🖼️ 关键图片


📊 实验亮点
实验结果表明,SELP在无人机导航任务中,安全率比现有方法提高了10.8%,计划效率提高了19.8%。在机器人操作任务中,安全率提高了20.4%。这些数据表明,SELP在生成安全高效的机器人任务规划方面具有显著优势。
🎯 应用场景
该研究成果可广泛应用于机器人自动化领域,例如无人机自主导航、智能仓储物流、家庭服务机器人等。通过将自然语言指令转化为安全高效的机器人任务规划,可以显著降低人工干预的需求,提高机器人的自主性和智能化水平,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
Despite significant advancements in large language models (LLMs) that enhance robot agents' understanding and execution of natural language (NL) commands, ensuring the agents adhere to user-specified constraints remains challenging, particularly for complex commands and long-horizon tasks. To address this challenge, we present three key insights, equivalence voting, constrained decoding, and domain-specific fine-tuning, which significantly enhance LLM planners' capability in handling complex tasks. Equivalence voting ensures consistency by generating and sampling multiple Linear Temporal Logic (LTL) formulas from NL commands, grouping equivalent LTL formulas, and selecting the majority group of formulas as the final LTL formula. Constrained decoding then uses the generated LTL formula to enforce the autoregressive inference of plans, ensuring the generated plans conform to the LTL. Domain-specific fine-tuning customizes LLMs to produce safe and efficient plans within specific task domains. Our approach, Safe Efficient LLM Planner (SELP), combines these insights to create LLM planners to generate plans adhering to user commands with high confidence. We demonstrate the effectiveness and generalizability of SELP across different robot agents and tasks, including drone navigation and robot manipulation. For drone navigation tasks, SELP outperforms state-of-the-art planners by 10.8% in safety rate (i.e., finishing tasks conforming to NL commands) and by 19.8% in plan efficiency. For robot manipulation tasks, SELP achieves 20.4% improvement in safety rate. Our datasets for evaluating NL-to-LTL and robot task planning will be released in github.com/lt-asset/selp.