An Interactive Hands-Free Controller for a Riding Ballbot to Enable Simple Shared Control Tasks
作者: Chenzhang Xiao, Seung Yun Song, Yu Chen, Mahshid Mansouri, Joao Ramos, William R. Norris, Elizabeth T. Hsiao-Wecksler
分类: cs.RO
发布日期: 2024-09-27
💡 一句话要点
提出交互式免手持控制方案,提升骑乘式平衡球机器人的共享控制性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 骑乘式机器人 平衡球机器人 免手持控制 共享控制 人机交互
📋 核心要点
- 现有免手持导纳控制方案(HACS)需要较强的运动协调能力,且易因操作不熟练导致碰撞。
- 提出交互式免手持控制方案(iHACS),通过控制增益个性化和交互补偿模块,提升速度跟踪性能。
- 实验表明,iHACS能有效限制机器人速度,增强机器人对骑乘者的控制,实现人机协同。
📝 摘要(中文)
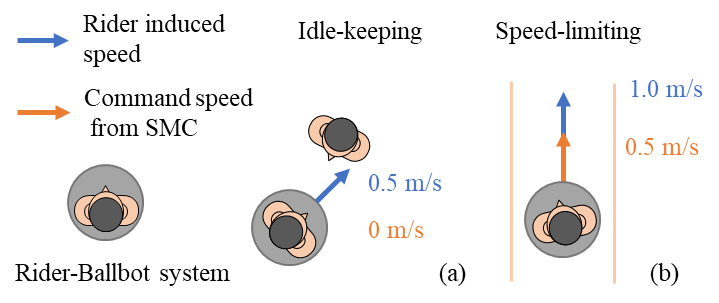
本文提出了一种交互式免手持控制方案(iHACS),用于改善骑乘式平衡球机器人(PURE)的速度跟踪性能。该方案在原有的免手持导纳控制方案(HACS)基础上,增加了控制增益个性化模块和交互补偿模块。通过人体骑乘实验,对比了HACS和iHACS在空闲保持和速度限制等简单任务中的性能。实验招募了两名手动轮椅使用者和两名健全人士,并指示他们使用“对抗性”的躯干运动来测试共享控制器在保持机器人静止或低于设定速度的能力。结果表明,在空闲保持任务中,即使在显著的躯干倾斜角度下,iHACS也能实现最小的平移运动和较低的指令速度跟踪均方根误差。在速度限制任务中,当指令速度饱和在0.5 m/s时,使用iHACS的系统平均最大速度为1.1 m/s,而使用HACS时超过1.9 m/s。这些结果表明,iHACS可以增强PURE对骑乘者的控制权限,从而使PURE能够向骑乘者提供物理交互,并实现协作的骑乘者-机器人协同。
🔬 方法详解
问题定义:论文旨在解决骑乘式平衡球机器人(PURE)在共享控制场景下,骑乘者躯干运动容易导致机器人无法准确跟踪共享控制器指令速度的问题。现有的免手持导纳控制方案(HACS)虽然允许骑乘者通过躯干倾斜和扭转来控制机器人,但对骑乘者的运动协调能力要求较高,且在共享控制模式下,骑乘者的随意运动容易干扰共享控制器的速度指令,导致机器人运动不稳定甚至发生碰撞。
核心思路:论文的核心思路是通过增强机器人对骑乘者的控制权限,从而使机器人能够更好地执行共享控制器的指令。具体来说,通过引入控制增益个性化模块和交互补偿模块,使机器人能够根据骑乘者的运动状态调整控制参数,并对骑乘者的干扰运动进行补偿,从而提高速度跟踪性能。
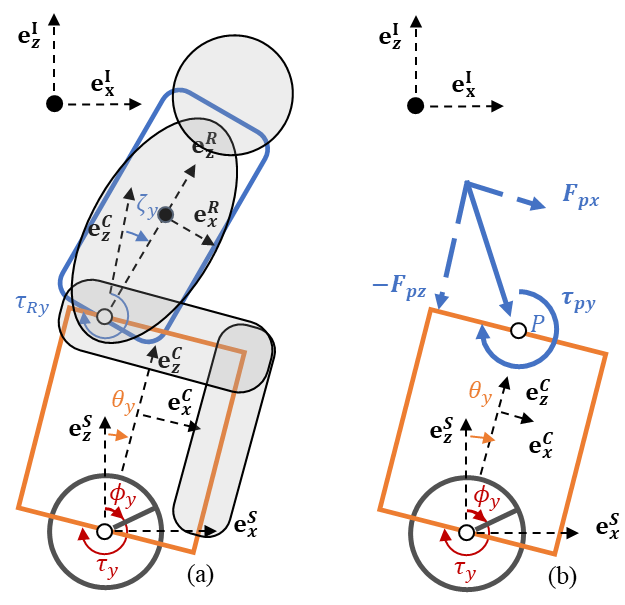
技术框架:iHACS的整体框架是在原有的HACS基础上增加了两个模块。首先是控制增益个性化模块,该模块根据骑乘者的躯干运动状态(例如倾斜角度和扭转角度)动态调整控制增益,从而使机器人能够更好地适应骑乘者的控制风格。其次是交互补偿模块,该模块通过估计骑乘者对机器人的干扰力矩,并进行相应的补偿,从而减少骑乘者运动对机器人速度跟踪的影响。整个系统通过传感器获取骑乘者的躯干运动数据,然后经过iHACS处理后,控制机器人的电机,实现平衡和运动控制。
关键创新:iHACS的关键创新在于其交互式的控制策略,即机器人不仅接受骑乘者的控制指令,还能根据骑乘者的运动状态进行自适应调整和补偿。这种交互式的控制方式能够有效地增强机器人的控制权限,使其能够更好地执行共享控制器的指令,并实现人机协同。与传统的HACS相比,iHACS能够更好地适应不同骑乘者的控制风格,并减少骑乘者运动对机器人运动的影响。
关键设计:控制增益个性化模块的设计主要考虑了骑乘者躯干倾斜角度和扭转角度对控制效果的影响,通过建立一个查找表或使用函数拟合的方式,将控制增益与这些角度关联起来。交互补偿模块的设计则需要估计骑乘者对机器人的干扰力矩,这可以通过力矩传感器或基于模型的估计方法来实现。具体的参数设置需要根据机器人的动力学特性和实验数据进行调整。论文中可能使用了PID控制或其他先进的控制算法来实现速度跟踪和平衡控制。
🖼️ 关键图片

📊 实验亮点
实验结果表明,在空闲保持任务中,iHACS即使在显著的躯干倾斜角度下也能保持最小的平移运动和较低的指令速度跟踪均方根误差。在速度限制任务中,当指令速度饱和在0.5 m/s时,使用iHACS的系统平均最大速度为1.1 m/s,而使用HACS时超过1.9 m/s,显著提升了速度控制的精度和安全性。
🎯 应用场景
该研究成果可应用于康复机器人、代步机器人等领域,尤其适用于行动不便人士。通过共享控制,机器人可以辅助用户完成日常活动,提高生活质量。未来,该技术有望应用于更复杂的任务,例如在拥挤环境中安全导航,或在崎岖地形上稳定行驶。
📄 摘要(原文)
Our team developed a riding ballbot (called PURE) that is dynamically stable, omnidirectional, and driven by lean-to-steer control. A hands-free admittance control scheme (HACS) was previously integrated to allow riders with different torso functions to control the robot's movements via torso leaning and twisting. Such an interface requires motor coordination skills and could result in collisions with obstacles due to low proficiency. Hence, a shared controller (SC) that limits the speed of PURE could be helpful to ensure the safety of riders. However, the self-balancing dynamics of PURE could result in a weak control authority of its motion, in which the torso motion of the rider could easily result in poor tracking of the command speed dictated by the shared controller. Thus, we proposed an interactive hands-free admittance control scheme (iHACS), which added two modules to HACS to improve the speed-tracking performance of PURE: control gain personalization module and interaction compensation module. Human riding tests of simple tasks, idle-keeping and speed-limiting, were conducted to compare the performance of HACS and iHACS. Two manual wheelchair users and two able-bodied individuals participated in this study. They were instructed to use "adversarial" torso motions that would tax the SC's ability to keep the ballbot idling or below a set speed. In the idle-keeping tasks, iHACS demonstrated minimal translational motion and low command speed tracking RMSE, even with significant torso lean angles. During the speed-limiting task with command speed saturated at 0.5 m/s, the system achieved an average maximum speed of 1.1 m/s with iHACS, compared with that of over 1.9 m/s with HACS. These results suggest that iHACS can enhance PURE's control authority over the rider, which enables PURE to provide physical interactions back to the rider and results in a collaborative rider-robot synergy.