Towards Accessible Robot Control: Comparing Kinesthetic Teaching, SpaceMouse Teleoperation, and a Mixed Reality Interface
作者: Aliyah Smith, Monroe Kennedy
分类: cs.RO
发布日期: 2024-09-27 (更新: 2026-01-17)
备注: 32 pages, 12 figures
💡 一句话要点
对比动觉示教、SpaceMouse遥操作和混合现实界面,提升机器人控制可及性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 遥操作 人机交互 机器人控制 混合现实 用户研究 动觉示教 非专业用户
📋 核心要点
- 现有遥操作界面在非专业用户使用时,性能与直接人工引导存在差距,可用性不足。
- 论文对比动觉示教、SpaceMouse遥操作和混合现实界面,评估非专业用户在不同控制方式下的表现。
- 实验结果表明SpaceMouse和MR界面性能相当,但任务复杂度增加时成功率下降,需关注用户学习和理解能力。
📝 摘要(中文)
遥操作界面是实现人类控制机器人系统的关键工具。尽管已经开发了各种界面,但人类通过这些界面所能达到的性能水平与直接人工引导机器人控制所提供的能力之间仍然存在差距。当用户缺乏经验或不熟悉机器人平台或控制界面时,这种差距会进一步扩大。本文旨在通过比较两种遥操作方法(SpaceMouse遥操作和混合现实(MR)界面)与动觉示教(一种非遥操作基线)来更好地描述非专业用户的这种性能差距。所有三种方法都在一项全面的用户研究中进行了评估,该研究涉及两个机器人平台和六个复杂的操纵任务。定量结果表明,SpaceMouse和MR界面的性能相当,只有两个任务在任务完成方面存在显著差异,并且成功率随着任务复杂性的增加而下降。定性分析反映了这些趋势,突出了物理需求方面的差异,并确定了影响用户执行、学习和理解能力的界面属性。这项研究量化了当前遥操作方法的局限性,并纳入了来自25名参与者的主观反馈。结果强调了为非专业用户设计和严格评估遥操作系统的关键需求,特别是在自主机器人在个人或日常环境中部署的情况下,以确保可用性、效率和可及性。
🔬 方法详解
问题定义:论文旨在解决非专业用户在使用遥操作界面控制机器人时,性能与直接人工引导存在差距的问题。现有遥操作方法通常针对专业用户设计,对非专业用户而言,学习成本高、操作复杂,难以充分发挥机器人的潜力。因此,如何设计更易于非专业用户使用的遥操作界面,提升其控制效率和成功率,是本文要解决的关键问题。
核心思路:论文的核心思路是通过对比不同的遥操作界面(SpaceMouse和混合现实界面)与动觉示教(一种直接人工引导方法),量化非专业用户在使用不同界面时的性能差异,并分析影响用户体验和学习效果的关键因素。通过用户研究,收集用户的主观反馈,从而为未来设计更易于使用、更高效的遥操作界面提供指导。
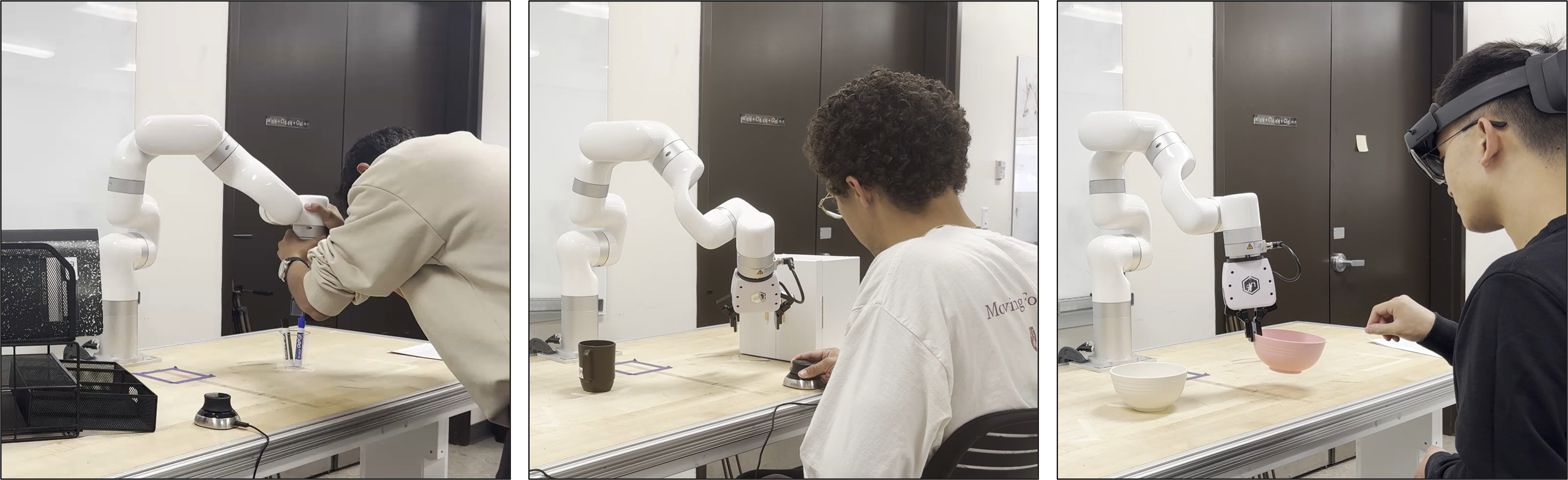
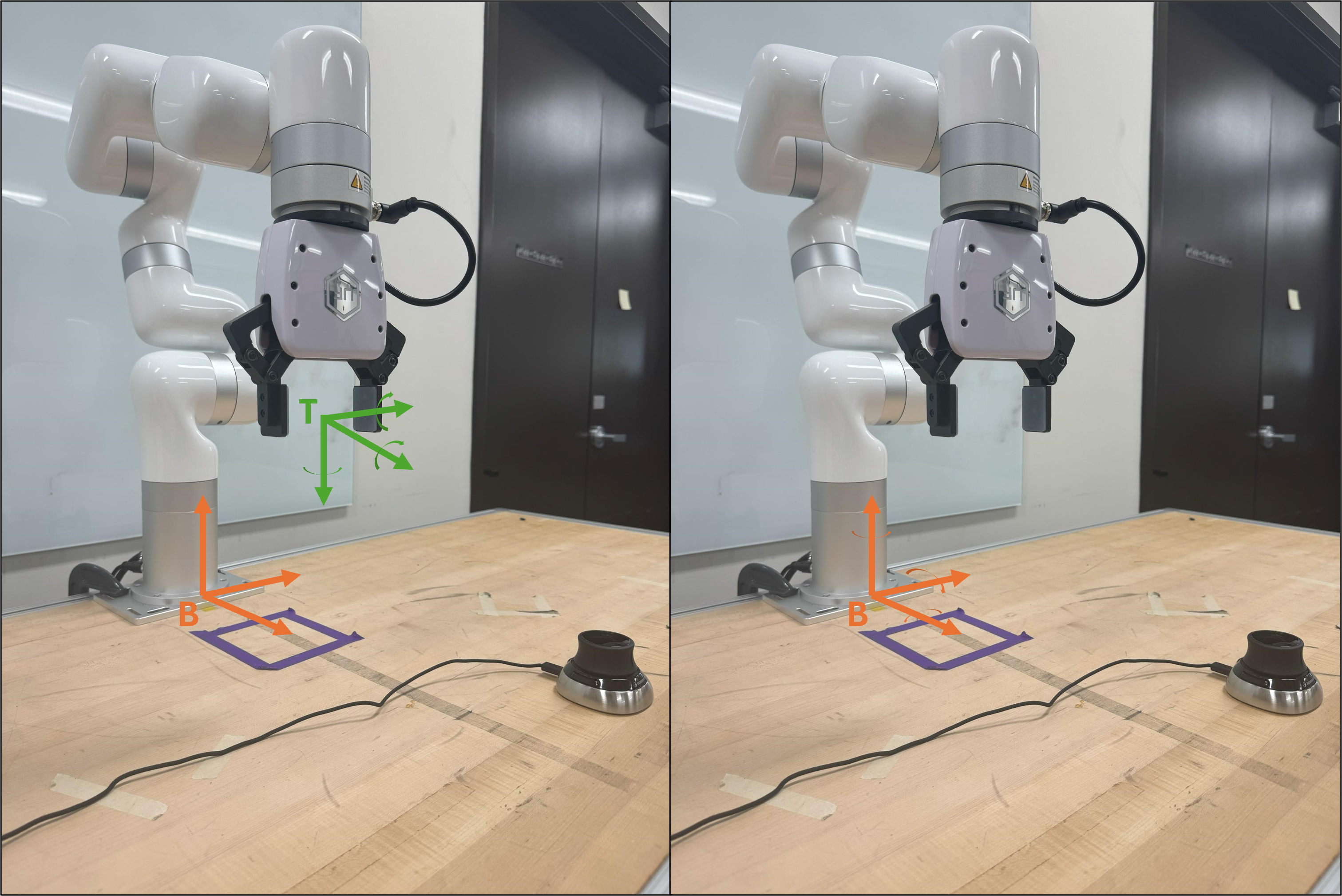
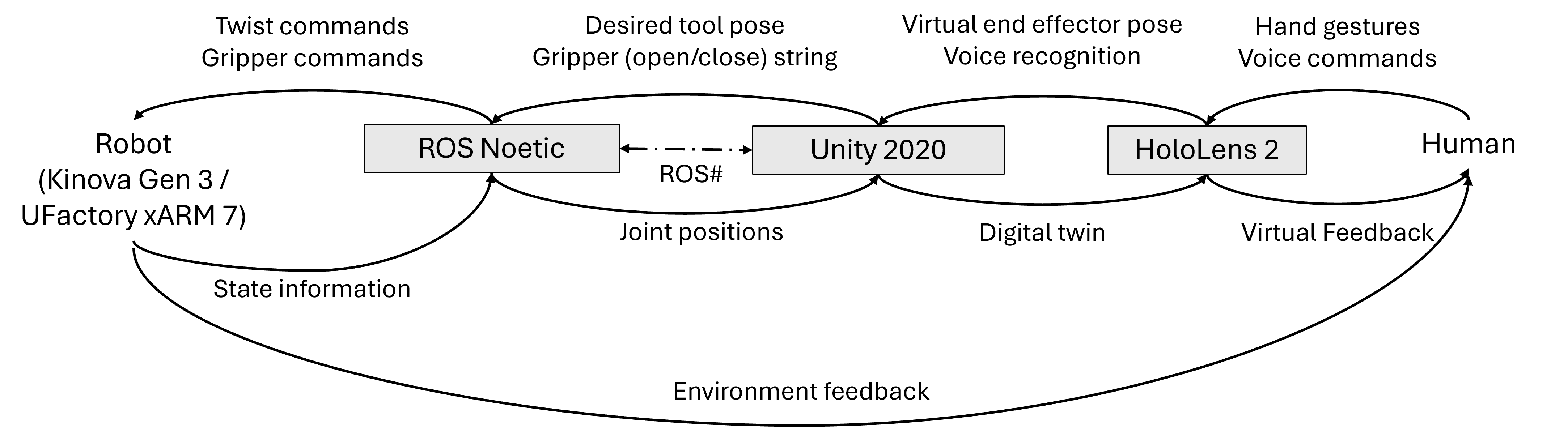
技术框架:论文采用用户研究的方法,对比三种控制方式:1) 动觉示教:用户直接引导机器人完成任务,作为性能上限的基准;2) SpaceMouse遥操作:用户使用SpaceMouse控制机器人的运动;3) 混合现实界面:用户通过混合现实设备与机器人进行交互。研究涉及两个机器人平台和六个复杂的操纵任务。通过定量指标(如任务完成时间、成功率)和定性指标(如用户主观评价)评估不同控制方式的性能。
关键创新:论文的关键创新在于系统性地对比了多种遥操作界面与动觉示教在非专业用户场景下的性能差异,并结合定量和定性分析,深入探讨了影响用户体验和学习效果的关键因素。不同于以往侧重于提升遥操作性能的研究,本文更关注非专业用户的可及性和易用性,为未来遥操作界面的设计提供了新的视角。
关键设计:论文的关键设计包括:1) 选择具有代表性的遥操作界面(SpaceMouse和混合现实界面);2) 设计具有挑战性的操纵任务,以区分不同控制方式的性能差异;3) 采用用户研究的方法,收集用户的定量数据(任务完成时间、成功率)和定性数据(用户主观评价);4) 采用统计分析方法,分析不同控制方式的性能差异,并识别影响用户体验的关键因素。
🖼️ 关键图片
📊 实验亮点
实验结果表明,SpaceMouse和MR界面在性能上相当,但在任务复杂度增加时,成功率显著下降。定性分析表明,物理需求是影响用户体验的关键因素。用户反馈强调了界面设计对用户学习和理解能力的重要性。该研究量化了当前遥操作方法在非专业用户场景下的局限性,为未来遥操作界面的设计提供了重要的参考依据。
🎯 应用场景
该研究成果可应用于各种需要非专业人员进行机器人遥操作的场景,例如家庭服务机器人、医疗辅助机器人、灾难救援机器人等。通过设计更易于使用、更高效的遥操作界面,可以降低用户的使用门槛,提升机器人的应用范围和实用价值,使机器人技术更好地服务于人类生活。
📄 摘要(原文)
Teleoperation interfaces are essential tools for enabling human control of robotic systems. Although a wide range of interfaces has been developed, a persistent gap remains between the level of performance humans can achieve through these interfaces and the capabilities afforded by direct human-guided robot control. This gap is further exacerbated when users are inexperienced or unfamiliar with the robotic platform or control interface. In this work, we aim to better characterize this performance gap for non-expert users by comparing two teleoperation approaches, SpaceMouse teleoperation and a Mixed Reality (MR) interface, against kinesthetic teaching as a non-teleoperation baseline. All three approaches were evaluated in a comprehensive user study involving two robotic platforms and six complex manipulation tasks. Quantitative results show that the SpaceMouse and MR interfaces performed comparably, with significant differences in task completion observed for only two tasks, and success rates declining as task complexity increased. Qualitative analysis reflected these trends, highlighting differences in Physical Demand and identifying interface attributes that influence users' ability to perform, learn, and understand. This study quantifies the limitations of current teleoperation methods and incorporates subjective feedback from 25 participants. The results highlight the critical need to design and rigorously evaluate teleoperation systems for non-expert users, particularly in contexts where autonomous robots are deployed in personal or everyday environments, to ensure usability, efficiency, and accessibility.