Accelerated gradient descent for high frequency Model Predictive Control
作者: Jianghan Zhang, Armand Jordana, Ludovic Righetti
分类: cs.RO
发布日期: 2024-09-26
💡 一句话要点
针对高频模型预测控制,提出加速梯度下降方法以媲美二阶方法性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 加速梯度下降 机器人控制 最优控制 一阶方法
📋 核心要点
- 二阶方法在模型预测控制中表现出强大的收敛性,但其高效实现面临挑战。
- 本文探索一阶方法在模型预测控制中的潜力,旨在简化实现并保持性能。
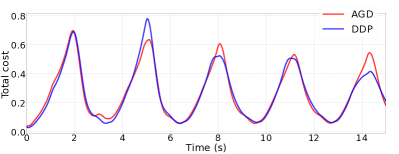
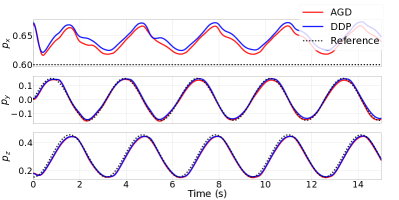
- 实验表明,对于力矩控制机械臂,一阶方法能够达到与二阶方法相当的性能。
📝 摘要(中文)
模型预测控制(MPC)在机器人领域的应用前景促使研究者们开发定制的二阶方法,以高效地解决最优控制问题。虽然这些方法具有很强的收敛性,但实现高效的定制化实现方案极具挑战。本文研究了一阶方法的潜在有效性,并在力矩控制的机械臂上证明,它们可以达到二阶方法的性能水平。
🔬 方法详解
问题定义:论文旨在解决高频模型预测控制(MPC)中,传统二阶方法实现复杂、计算量大的问题。现有二阶方法虽然收敛性好,但工程实现难度高,需要大量的定制优化,限制了其在高实时性机器人控制中的应用。
核心思路:论文的核心思路是探索一阶方法(特别是加速梯度下降法)在MPC中的潜力,证明其在适当的条件下可以达到与二阶方法相当的性能,同时降低实现的复杂性。这种思路旨在简化MPC的实现,使其更容易应用于实际的机器人系统。
技术框架:论文的技术框架主要包括:1)建立力矩控制机械臂的动力学模型;2)设计基于MPC的控制器,将控制问题转化为最优控制问题;3)使用加速梯度下降法求解该最优控制问题;4)在实际机械臂上进行实验,评估控制器的性能。整体流程是从问题建模到算法实现,再到实验验证。
关键创新:论文的关键创新在于证明了一阶方法(加速梯度下降法)在高频MPC中具有竞争力。以往的研究通常认为二阶方法是解决MPC问题的首选,因为它们具有更快的收敛速度。然而,本文表明,通过仔细选择参数和优化实现,一阶方法也可以达到与二阶方法相当的性能,同时降低了计算复杂度和实现难度。
关键设计:论文的关键设计可能包括:1)加速梯度下降法的具体实现细节,例如步长的选择策略;2)针对力矩控制机械臂的动力学模型简化和优化;3)MPC控制器的参数调整,例如预测时域的长度和控制权重;4)实验评估指标的选择,例如控制精度、响应速度和计算时间。
🖼️ 关键图片

📊 实验亮点
论文通过在力矩控制机械臂上的实验证明,加速梯度下降法能够达到与二阶方法相当的性能。具体的性能数据(例如控制精度、响应速度和计算时间)未在摘要中给出,但强调了一阶方法在性能上可以媲美二阶方法,这表明其在高频MPC中具有实际应用价值。
🎯 应用场景
该研究成果可应用于各种需要高频模型预测控制的机器人系统,例如高速运动的机械臂、四足机器人、无人机等。通过简化控制器的实现,降低计算成本,可以使这些系统更加灵活、高效和可靠。此外,该研究也为其他控制算法的设计提供了新的思路。
📄 摘要(原文)
The recent promises of Model Predictive Control in robotics have motivated the development of tailored second-order methods to solve optimal control problems efficiently. While those methods benefit from strong convergence properties, tailored efficient implementations are challenging to derive. In this work, we study the potential effectiveness of first-order methods and show on a torque controlled manipulator that they can equal the performances of second-order methods.