Traverse the Non-Traversable: Estimating Traversability for Wheeled Mobility on Vertically Challenging Terrain
作者: Chenhui Pan, Aniket Datar, Anuj Pokhrel, Matthew Choulas, Mohammad Nazeri, Xuesu Xiao
分类: cs.RO
发布日期: 2024-09-26
备注: for associated video file, see https://www.youtube.com/watch?v=Shcalb8sGcA
💡 一句话要点
提出TNT方法,利用车辆-地形交互数据驱动地估计轮式机器人于垂直复杂地形上的可通行性。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 可通行性估计 轮式机器人 复杂地形 数据驱动 运动规划
📋 核心要点
- 现有可通行性估计方法难以处理垂直方向上具有挑战性的复杂地形,导致轮式机器人无法有效利用这些区域。
- TNT方法利用车辆与地形的运动学交互数据,以数据驱动的方式学习和估计复杂地形的可通行性。
- 实验表明,TNT方法显著提升了规划性能、效率和稳定性,在物理机器人平台上分别提升了50%、26.7%和9.2%。
📝 摘要(中文)
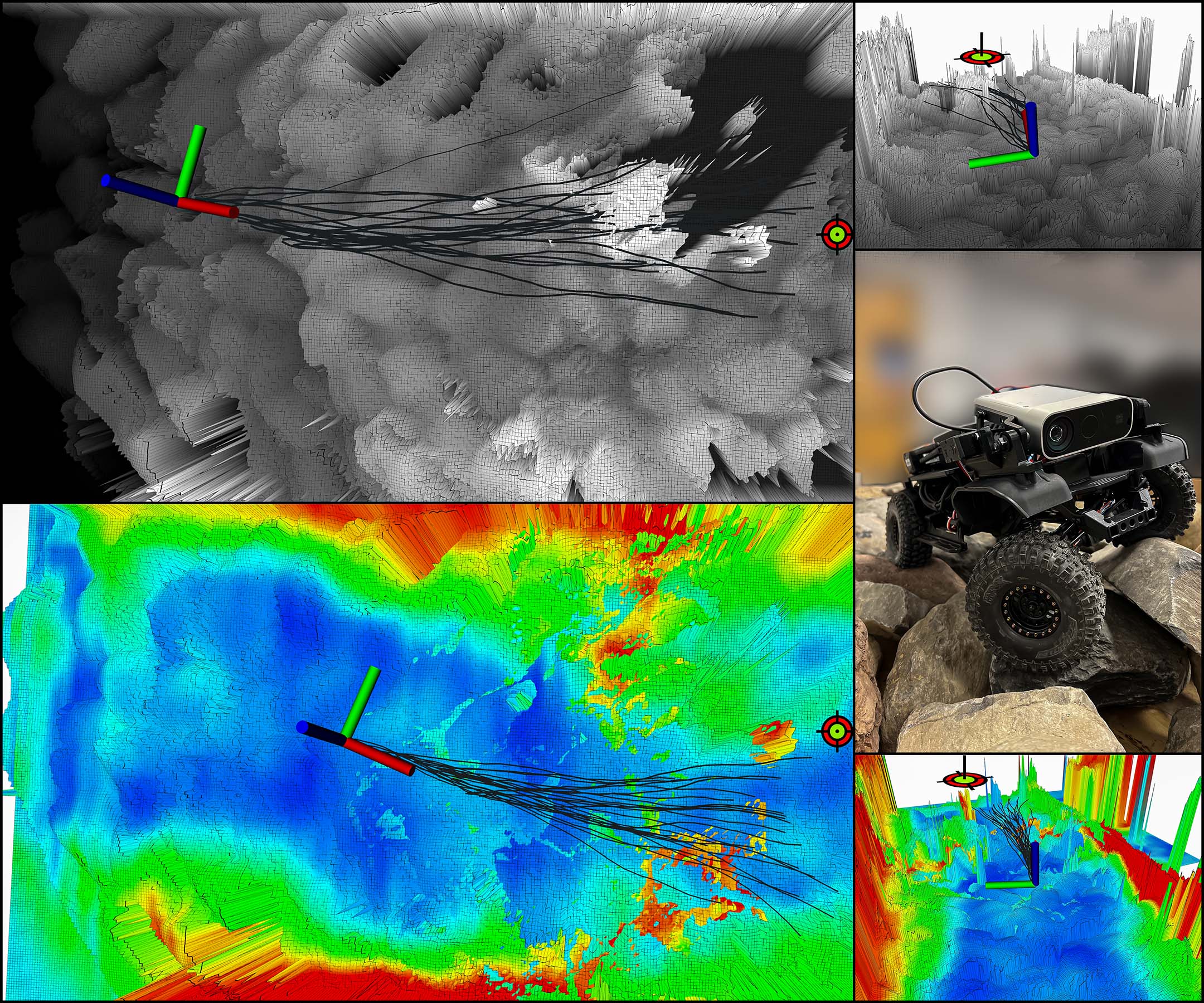
大多数可通行性估计技术将越野地形划分为可通行区域(如路面、碎石和草地)和不可通行区域(如巨石、植被和沟渠),然后引导后续规划器在可通行区域生成轨迹。然而,最近的研究表明,轮式机器人可以穿越垂直方向上具有挑战性的地形(例如,尺寸与车辆本身相当的极端崎岖巨石),而这些地形会被现有技术视为不可通行。 鉴于这些局限性,本研究旨在基于过去车辆-地形的运动学交互,以数据驱动的方式识别看似不可通行的垂直复杂地形中的可通行区域。 我们提出的“穿越不可通行区域”(TNT)可通行性估计器能够有效地指导下游基于采样的规划器,该规划器包含高精度的6自由度运动学模型,并可部署在小型车辆上。 此外,估计的可通行性也可以用作成本图,以规划全局和局部路径,而无需采样。 实验结果表明,在物理机器人平台上,TNT可以分别将规划性能、效率和稳定性提高50%、26.7%和9.2%。
🔬 方法详解
问题定义:现有可通行性估计方法通常将地形简单划分为可通行和不可通行区域,忽略了轮式机器人穿越垂直复杂地形的能力。这导致机器人无法有效利用这些区域,限制了其在复杂环境中的导航能力。现有方法无法有效建模车辆与复杂地形的交互,导致误判。
核心思路:TNT的核心在于利用车辆与地形的运动学交互数据,学习复杂地形的可通行性。通过分析车辆在特定地形上的运动状态变化,推断该地形的可通行程度。这种数据驱动的方法能够更好地适应不同类型的复杂地形,并考虑到车辆的运动学特性。
技术框架:TNT方法包含以下主要模块:1) 数据采集模块:通过传感器记录车辆在不同地形上的运动数据,包括位置、姿态、速度等。2) 特征提取模块:从运动数据中提取与可通行性相关的特征,例如车辆的颠簸程度、滑移量等。3) 可通行性估计模块:利用机器学习模型(具体模型未知)学习特征与可通行性之间的关系,估计地形的可通行程度。4) 规划模块:将估计的可通行性信息作为成本图,引导下游规划器生成可行的运动轨迹。
关键创新:TNT的关键创新在于其数据驱动的可通行性估计方法。与传统的基于规则或几何分析的方法不同,TNT能够从实际的车辆-地形交互数据中学习,从而更好地适应复杂地形的变化。此外,TNT方法能够直接输出可用于规划的成本图,简化了规划流程。
关键设计:论文中未明确说明具体的机器学习模型、特征提取方法和损失函数等技术细节。但可以推测,特征提取可能包括车辆姿态变化率、加速度、电机电流等信息。损失函数可能包含对实际通过区域的奖励和对碰撞区域的惩罚。具体的网络结构未知。
🖼️ 关键图片

📊 实验亮点
实验结果表明,TNT方法在物理机器人平台上显著提升了规划性能、效率和稳定性。具体而言,规划性能提升了50%,规划效率提升了26.7%,规划稳定性提升了9.2%。这些数据表明,TNT方法能够有效地提高轮式机器人在垂直复杂地形中的导航能力,使其能够更安全、更高效地完成任务。
🎯 应用场景
该研究成果可应用于各种需要在复杂地形中导航的轮式机器人,例如:火星探测车、农业机器人、搜救机器人等。通过提高机器人在复杂地形中的导航能力,可以扩展其应用范围,使其能够执行更复杂的任务。此外,该方法还可以用于辅助驾驶系统,提高车辆在非结构化道路上的行驶安全性。
📄 摘要(原文)
Most traversability estimation techniques divide off-road terrain into traversable (e.g., pavement, gravel, and grass) and non-traversable (e.g., boulders, vegetation, and ditches) regions and then inform subsequent planners to produce trajectories on the traversable part. However, recent research demonstrated that wheeled robots can traverse vertically challenging terrain (e.g., extremely rugged boulders comparable in size to the vehicles themselves), which unfortunately would be deemed as non-traversable by existing techniques. Motivated by such limitations, this work aims at identifying the traversable from the seemingly non-traversable, vertically challenging terrain based on past kinodynamic vehicle-terrain interactions in a data-driven manner. Our new Traverse the Non-Traversable(TNT) traversability estimator can efficiently guide a down-stream sampling-based planner containing a high-precision 6-DoF kinodynamic model, which becomes deployable onboard a small-scale vehicle. Additionally, the estimated traversability can also be used as a costmap to plan global and local paths without sampling. Our experiment results show that TNT can improve planning performance, efficiency, and stability by 50%, 26.7%, and 9.2% respectively on a physical robot platform.