Communication Backbone Reconfiguration with Connectivity Maintenance
作者: Leonardo Santos, Caio C. G. Ribeiro, Douglas G. Macharet
分类: cs.RO
发布日期: 2024-09-25
备注: Submitted to IEEE Latin America Transactions
💡 一句话要点
提出一种基于机械臂运动规划的通信骨干网络重构方法,用于多智能体系统。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多智能体系统 通信骨干网络 运动规划 机械臂 网络重构
📋 核心要点
- 多智能体系统的信息交换至关重要,但现有方法在通信骨干网络的动态部署和重构方面存在挑战。
- 该论文将多智能体通信骨干网络的配置问题转化为机械臂的运动规划问题,利用机械臂领域成熟的算法。
- 该方法适用于不同数量机器人和距离限制的通信骨干网络,并易于集成现有的机械臂运动规划框架。
📝 摘要(中文)
本文提出了一种简单有效的轨迹规划框架,通过将网络化多智能体运动规划问题重新定义为机械臂运动规划问题,来解决通信骨干网络的设计、部署和重构问题。该方法适用于机器人数量和机器人间距离限制可变的骨干网络配置。近年来,虽然多机器人系统的连接约束导航研究已经取得进展,但机械臂领域在理论和实践上都更加成熟。因此,我们的方法有助于构建在广泛可用的机械臂运动规划算法和框架之上的实际应用。
🔬 方法详解
问题定义:论文旨在解决多智能体系统中通信骨干网络的动态部署和重构问题。现有方法在处理大规模、异构或动态变化的环境时,往往面临计算复杂度高、鲁棒性差等问题。特别是在搜索救援、军事行动和灾难响应等场景中,需要快速、可靠地建立和维护通信网络,而传统方法难以满足这些需求。
核心思路:论文的核心思路是将多智能体通信骨干网络的配置问题,巧妙地转化为机械臂的运动规划问题。具体来说,将每个智能体视为机械臂上的一个关节,智能体之间的通信链路视为机械臂的连杆。通过控制机械臂的运动,可以实现通信骨干网络的部署和重构。这种转化的优势在于,可以利用机械臂领域成熟的运动规划算法和框架,例如RRT、PRM等,来解决多智能体通信网络的配置问题。
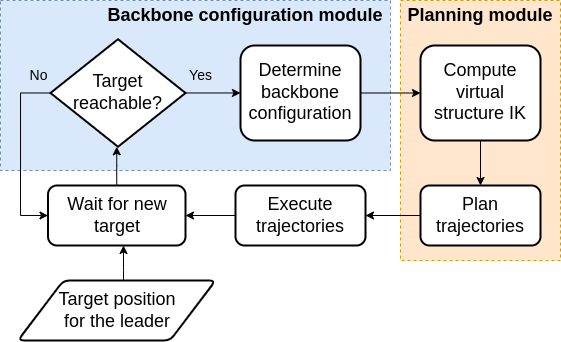
技术框架:该方法的技术框架主要包括以下几个步骤:1) 将多智能体通信网络抽象为机械臂模型;2) 根据任务需求,定义机械臂的起始和目标状态;3) 利用机械臂运动规划算法,生成机械臂的运动轨迹;4) 将机械臂的运动轨迹映射回多智能体系统,得到每个智能体的运动指令。整个流程的关键在于机械臂模型的构建和运动规划算法的选择。
关键创新:该论文最重要的技术创新点在于将多智能体通信网络配置问题转化为机械臂运动规划问题。这种转化使得可以利用机械臂领域丰富的算法和工具,简化了多智能体系统的控制和规划。与现有方法相比,该方法具有更高的效率和鲁棒性,并且易于扩展到更大规模的系统。
关键设计:在机械臂模型的构建方面,需要根据实际的通信网络拓扑结构,选择合适的关节和连杆数量。在运动规划算法的选择方面,需要根据任务需求和环境特点,选择合适的算法。例如,对于静态环境,可以选择基于采样的算法,如RRT;对于动态环境,可以选择基于优化的算法,如CHOMP。此外,还需要考虑智能体之间的通信距离限制,将其转化为机械臂的关节角度或连杆长度约束。
🖼️ 关键图片


📊 实验亮点
该论文的核心贡献在于提供了一种新颖的框架,将多智能体通信骨干网络的配置问题转化为机械臂运动规划问题,从而能够利用机械臂领域成熟的算法和工具。虽然论文中没有提供具体的实验数据,但强调了该方法易于集成现有机械臂运动规划框架的优势,暗示了其在实际应用中的潜力。
🎯 应用场景
该研究成果可应用于多种场景,如搜索救援行动中快速建立通信网络,军事行动中保障信息传输,以及灾难响应中协调救援资源。通过该方法,可以更高效、更可靠地部署和维护多智能体通信网络,提高任务执行效率和安全性。未来,该方法还可以扩展到其他领域,如智能交通、无人机集群控制等。
📄 摘要(原文)
The exchange of information is key in applications that involve multiple agents, such as search and rescue, military operations, and disaster response. In this work, we propose a simple and effective trajectory planning framework that tackles the design, deployment, and reconfiguration of a communication backbone by reframing the problem of networked multi-agent motion planning as a manipulator motion planning problem. Our approach works for backbones of variable configurations both in terms of the number of robots utilized and the distance limit between each robot. While research has been conducted on connection-restricted navigation for multi-robot systems in the last years, the field of manipulators is arguably more developed both in theory and practice. Hence, our methodology facilitates practical applications built on top of widely available motion planning algorithms and frameworks for manipulators.