Generative Factor Chaining: Coordinated Manipulation with Diffusion-based Factor Graph
作者: Utkarsh A. Mishra, Yongxin Chen, Danfei Xu
分类: cs.RO
发布日期: 2024-09-24
备注: 28 pages, 17 figures, 2024 Conference on Robot Learning
💡 一句话要点
提出基于扩散模型的生成式因子链,解决多机械臂协同操作规划难题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机械臂协同 操作规划 扩散模型 生成式模型 因子图
📋 核心要点
- 多机械臂协同操作规划因搜索空间大和约束复杂而极具挑战。
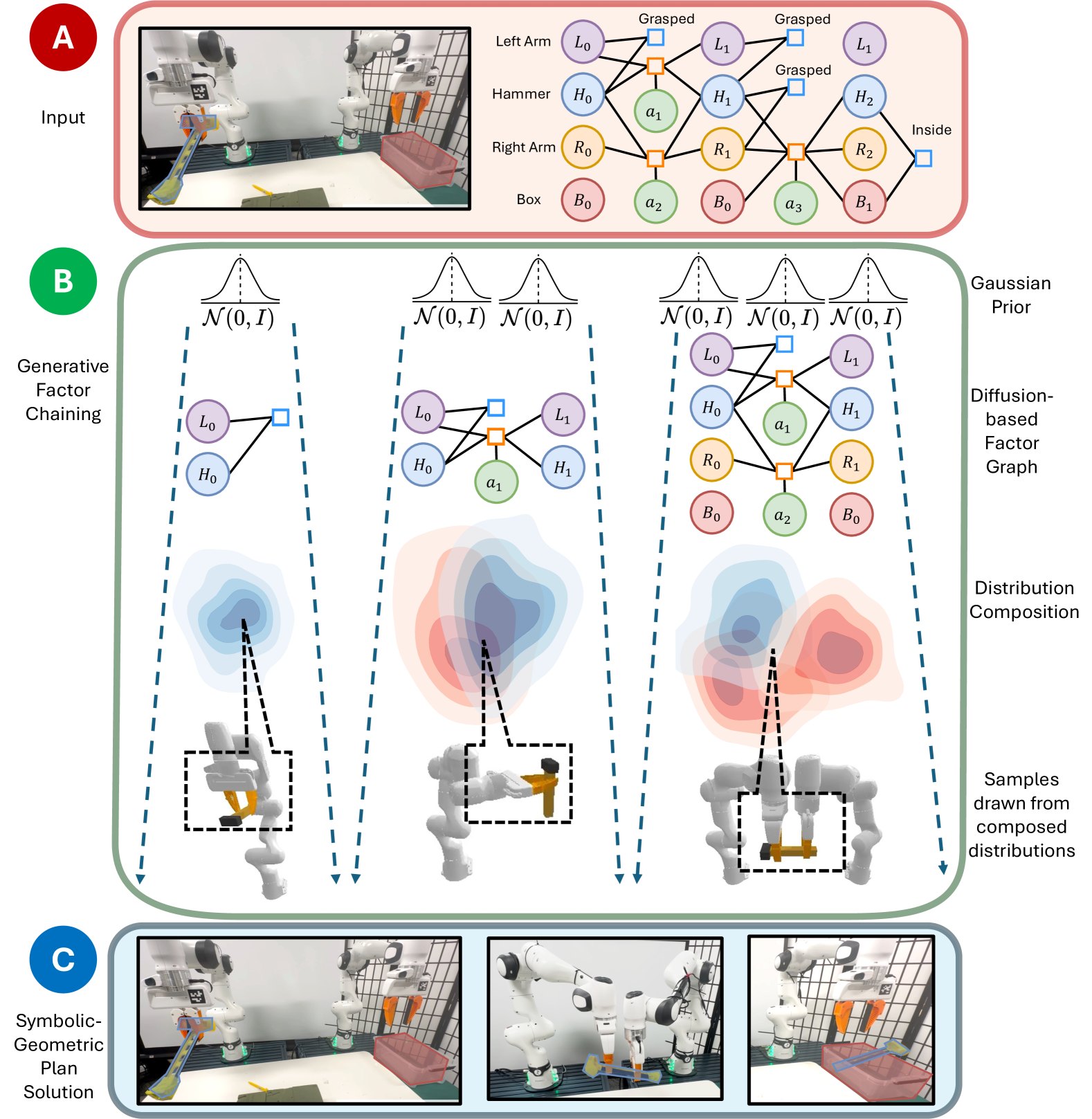
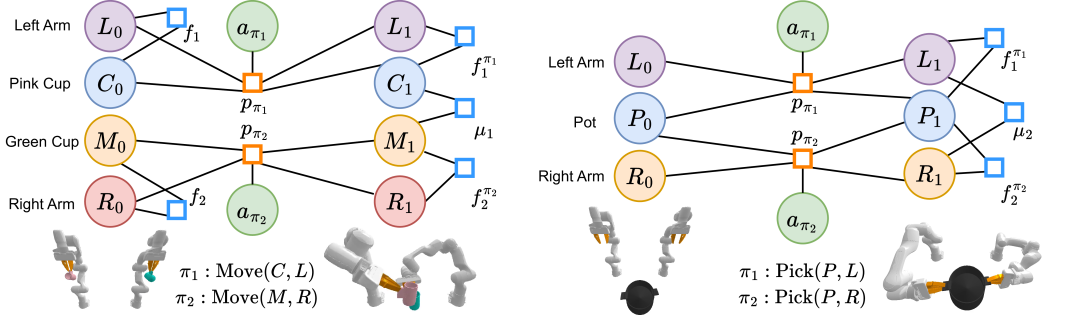
- GFC将规划问题建模为时空因子图,利用扩散模型学习节点关系和技能转换。
- 实验证明GFC能有效解决复杂双机械臂任务,并对新任务展现良好泛化性。
📝 摘要(中文)
本文提出了一种名为生成式因子链(GFC)的可组合生成模型,用于解决多步骤、多机械臂任务的规划问题。由于搜索空间巨大和复杂的约束满足问题,此类任务的规划非常困难。GFC将规划问题表示为一个时空因子图,其中节点代表场景中的物体和机器人,空间因子捕获节点间有效关系的分布,时间因子代表技能转换的分布。每个因子都实现为一个模块化的扩散模型,这些模型在推理过程中组合起来,通过双向消息传递生成可行的长时程规划。实验表明,GFC能够解决复杂的双机械臂操作任务,并且对具有新颖的物体和约束组合的未见过的规划任务表现出强大的泛化能力。
🔬 方法详解
问题定义:论文旨在解决多步骤、多机械臂协同操作任务的规划问题。现有方法通常面临搜索空间巨大、约束条件复杂等挑战,难以生成可行的长时程规划。这些方法在处理新颖的物体组合和约束时,泛化能力也往往不足。
核心思路:论文的核心思路是将规划问题分解为一系列时空约束关系,并使用因子图来表示这些关系。每个因子都对应一个扩散模型,用于学习特定关系或技能转换的分布。通过在因子图上进行消息传递,可以生成满足约束条件的可行规划。这种方法的核心在于将复杂的规划问题分解为多个易于学习和组合的模块化组件。
技术框架:GFC的整体框架包括以下几个主要模块:1)时空因子图构建:将场景中的物体和机器人表示为节点,空间关系和时间关系表示为因子。2)扩散模型训练:为每个因子训练一个扩散模型,学习对应关系或技能转换的分布。3)双向消息传递:在因子图上进行双向消息传递,利用扩散模型生成满足约束条件的规划。具体而言,通过前向消息传递,从初始状态开始逐步推断未来的状态;通过反向消息传递,从目标状态开始逐步推断过去的状态。4)规划生成:根据消息传递的结果,生成最终的规划。
关键创新:GFC的关键创新在于将扩散模型与因子图相结合,实现了一种可组合的生成式规划方法。与传统的规划方法相比,GFC能够更好地处理复杂约束和高维状态空间,并且具有更强的泛化能力。此外,GFC的模块化设计使得可以方便地添加新的因子和约束,从而扩展其应用范围。
关键设计:每个因子都实现为一个条件扩散模型,其输入包括相邻节点的状态和一些额外的上下文信息。扩散模型的具体结构可以根据任务的复杂程度进行调整。论文中使用了DDPM(Denoising Diffusion Probabilistic Models)作为扩散模型的具体实现。损失函数主要包括扩散模型的训练损失和一些额外的正则化项,以保证生成规划的质量。消息传递算法采用了置信度传播(Belief Propagation)的变体,以提高收敛速度和准确性。
🖼️ 关键图片

📊 实验亮点
实验结果表明,GFC在复杂的双机械臂操作任务上取得了显著的成功,并且对未见过的规划任务表现出强大的泛化能力。具体来说,GFC能够成功地完成诸如将物体从一个容器转移到另一个容器、组装多个部件等复杂任务。与传统的规划方法相比,GFC在成功率和规划效率方面都有显著提升。
🎯 应用场景
该研究成果可应用于各种需要多机械臂协同操作的场景,例如智能制造、物流自动化、医疗机器人等。通过学习不同物体和环境下的操作技能,机器人可以更灵活地完成复杂任务,提高生产效率和安全性。未来,该技术有望扩展到更多类型的机器人和更复杂的任务场景。
📄 摘要(原文)
Learning to plan for multi-step, multi-manipulator tasks is notoriously difficult because of the large search space and the complex constraint satisfaction problems. We present Generative Factor Chaining~(GFC), a composable generative model for planning. GFC represents a planning problem as a spatial-temporal factor graph, where nodes represent objects and robots in the scene, spatial factors capture the distributions of valid relationships among nodes, and temporal factors represent the distributions of skill transitions. Each factor is implemented as a modular diffusion model, which are composed during inference to generate feasible long-horizon plans through bi-directional message passing. We show that GFC can solve complex bimanual manipulation tasks and exhibits strong generalization to unseen planning tasks with novel combinations of objects and constraints. More details can be found at: https://generative-fc.github.io/