Intent Prediction-Driven Model Predictive Control for UAV Planning and Navigation in Dynamic Environments
作者: Zhefan Xu, Hanyu Jin, Xinming Han, Haoyu Shen, Kenji Shimada
分类: cs.RO
发布日期: 2024-09-24 (更新: 2025-03-23)
备注: 8 pages, 7 figures, 2 tables, experiment video: https://youtu.be/4xsEeMB9WPY, GitHub: https://github.com/Zhefan-Xu/Intent-MPC
期刊: IEEE Robotics and Automation Letters, 2025
💡 一句话要点
提出基于意图预测的MPC无人机规划导航方法,提升动态环境安全性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机导航 意图预测 模型预测控制 动态环境 马尔可夫决策过程
📋 核心要点
- 现有方法在动态环境中无人机导航面临感知和规划的挑战,尤其是在有限视角的相机下,跟踪不可靠。
- 该方法融合感知、意图预测和规划,利用MDP预测障碍物行为,并结合MPC生成安全轨迹。
- 实验结果表明,该方法显著降低了碰撞次数,提升了动态环境下的导航安全性。
📝 摘要(中文)
本文提出了一种综合性的无人机导航框架,用于解决动态环境中安全导航的问题,尤其是在人员密集的建筑工地等场景。该框架集成了感知、意图预测和规划三个模块。感知模块能够高效地检测和跟踪动态障碍物,并处理碰撞规避期间的跟踪丢失和遮挡问题。意图预测模块采用马尔可夫决策过程(MDP)来预测动态障碍物的潜在行为,并生成可能的未来轨迹。最后,一种新颖的基于意图的规划算法,利用模型预测控制(MPC),生成导航轨迹。仿真和物理实验表明,与基准方法相比,该方法能够显著减少碰撞次数,提高导航安全性。
🔬 方法详解
问题定义:无人机在动态环境中安全导航,尤其是在人员密集的场景中,是一个具有挑战性的问题。现有的方法在感知和规划方面存在不足。感知方面,无人机受限于载重,通常使用视场角有限的相机,导致在避障过程中容易出现跟踪丢失和遮挡。规划方面,动态环境的快速变化使得生成的轨迹容易过时,难以保证安全。
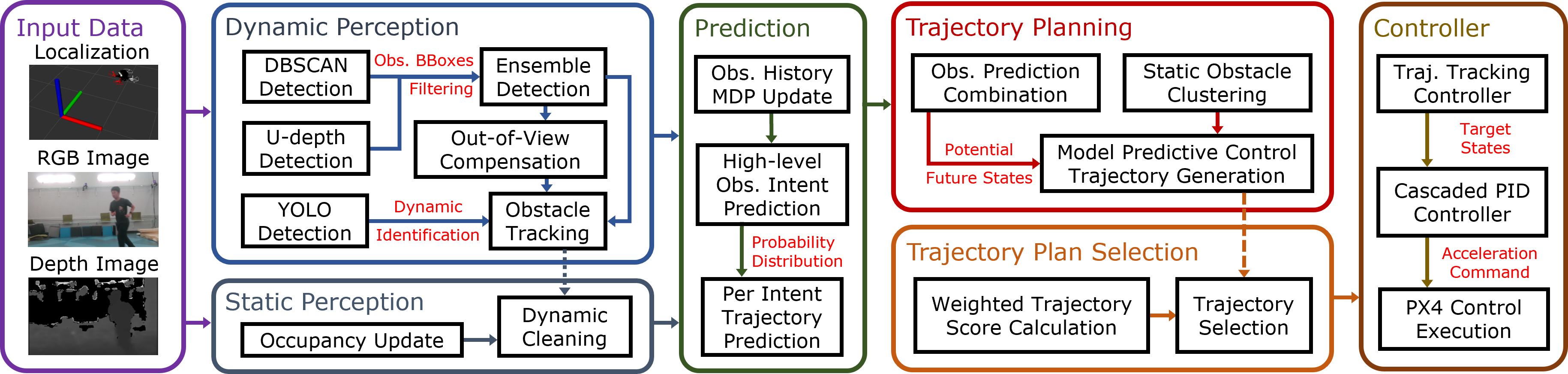
核心思路:该论文的核心思路是结合感知、意图预测和规划,通过预测动态障碍物的未来行为,并将其纳入无人机轨迹规划中,从而提高导航的安全性。具体来说,首先通过感知模块检测和跟踪动态障碍物,然后利用意图预测模块预测障碍物的潜在行为,最后基于预测的意图,使用模型预测控制(MPC)生成无人机的安全轨迹。
技术框架:该导航框架主要包含三个模块:感知模块、意图预测模块和规划模块。感知模块负责检测和跟踪动态障碍物,并处理跟踪丢失和遮挡问题。意图预测模块采用马尔可夫决策过程(MDP)来预测动态障碍物的潜在行为,并生成可能的未来轨迹。规划模块则利用模型预测控制(MPC),基于预测的意图,生成无人机的导航轨迹。
关键创新:该论文的关键创新在于将意图预测融入到无人机的轨迹规划中。传统的无人机导航方法通常只考虑当前时刻的障碍物位置,而忽略了障碍物的未来行为。该论文通过意图预测模块,预测障碍物的潜在行为,并将其纳入无人机的轨迹规划中,从而提高了导航的安全性。
关键设计:意图预测模块使用马尔可夫决策过程(MDP)来建模动态障碍物的行为。MDP的状态空间包括障碍物的位置、速度等信息,动作空间包括障碍物的可能的运动方向和速度。奖励函数的设计需要考虑安全性、效率等因素。规划模块使用模型预测控制(MPC)来生成无人机的轨迹。MPC通过优化一个目标函数,在满足约束条件的前提下,找到最优的控制序列。目标函数通常包括无人机的轨迹长度、与障碍物的距离等因素。约束条件包括无人机的运动学约束、动力学约束等。
🖼️ 关键图片


📊 实验亮点
仿真和物理实验结果表明,该方法能够显著减少碰撞次数,提高导航安全性。与基准方法相比,该方法在动态环境中实现了更低的碰撞率,验证了意图预测在无人机导航中的有效性。具体的性能数据(例如碰撞率降低百分比)在论文中进行了详细展示。
🎯 应用场景
该研究成果可应用于建筑工地、仓库、灾后救援等动态环境下的无人机自主导航。通过预测人员或车辆的意图,无人机可以更安全地执行巡检、测绘、物资运输等任务,提高工作效率,降低安全风险。未来,该技术有望进一步推广到其他类型的移动机器人,例如自动驾驶汽车、服务机器人等。
📄 摘要(原文)
Aerial robots can enhance construction site productivity by autonomously handling inspection and mapping tasks. However, ensuring safe navigation near human workers remains challenging. While navigation in static environments has been well studied, navigating dynamic environments remains open due to challenges in perception and planning. Payload limitations restrict the robots to using cameras with limited fields of view, resulting in unreliable perception and tracking during collision avoidance. Moreover, the rapidly changing conditions of dynamic environments can quickly make the generated optimal trajectory outdated.To address these challenges, this paper presents a comprehensive navigation framework that integrates perception, intent prediction, and planning. Our perception module detects and tracks dynamic obstacles efficiently and handles tracking loss and occlusion during collision avoidance. The proposed intent prediction module employs a Markov Decision Process (MDP) to forecast potential actions of dynamic obstacles with the possible future trajectories. Finally, a novel intent-based planning algorithm, leveraging model predictive control (MPC), is applied to generate navigation trajectories. Simulation and physical experiments demonstrate that our method improves the safety of navigation by achieving the fewest collisions compared to benchmarks.