A Modular Robotic System for Autonomous Exploration and Semantic Updating in Large-Scale Indoor Environments
作者: Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
分类: cs.RO, cs.CV
发布日期: 2024-09-23 (更新: 2025-09-19)
备注: 10 pages, 9 figures, 5 tables. Project page is available at https://irvlutd.github.io/SemanticMapping/
💡 一句话要点
提出一种模块化机器人系统,用于大规模室内环境的自主探索和语义地图更新。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 自主探索 语义地图 机器人导航 SLAM 对象检测
📋 核心要点
- 现有方法依赖人工遥控或预先采集的数据集,难以实现大规模未知环境下的机器人自主探索和语义地图构建。
- 该论文提出一种两阶段方法,首先进行几何地图构建,然后重访环境并更新对象语义,实现端到端自主。
- 实验结果表明,该系统在真实室内环境中实现了鲁棒且可扩展的语义映射和持续适应能力。
📝 摘要(中文)
本文提出了一种模块化机器人系统,用于大规模未知环境中的自主探索和语义更新。该方法使移动机器人能够构建、重访和更新混合语义地图,该地图集成了用于几何信息的2D占据栅格和用于对象语义信息的拓扑图。与依赖于手动遥控或预收集数据集的现有方法不同,我们的两阶段方法实现了端到端自主:首先,一种改进的基于前沿的探索算法,带有动态搜索窗口,构建了几何地图;其次,使用贪婪轨迹规划器,机器人重访环境,并使用开放词汇对象检测和分割来更新对象语义。该模块化系统与任何度量SLAM框架兼容,通过有效更新语义图以反映短期和长期变化(如对象重定位、移除或添加)来支持连续操作。我们在真实室内环境中(面积约为8500平方米和117平方米)的Fetch机器人上验证了该方法,展示了鲁棒且可扩展的语义映射和持续适应能力,标志着在物理机器人上实现了探索、映射和语义更新的完全自主集成。
🔬 方法详解
问题定义:现有方法在大型未知室内环境中进行自主探索和语义地图构建时,通常依赖于人工遥控或预先收集的数据集,这限制了其可扩展性和自主性。此外,环境中的物体可能会发生移动、移除或添加等变化,现有的语义地图构建方法难以有效地进行更新,从而影响机器人的长期自主导航和交互。
核心思路:该论文的核心思路是将几何地图构建和语义地图更新解耦为两个阶段,并采用模块化的设计,使得系统可以灵活地集成不同的SLAM框架和对象检测/分割算法。通过改进的基于前沿的探索算法和贪婪轨迹规划器,机器人可以自主地探索环境并更新语义地图,从而实现长期自主导航和交互。
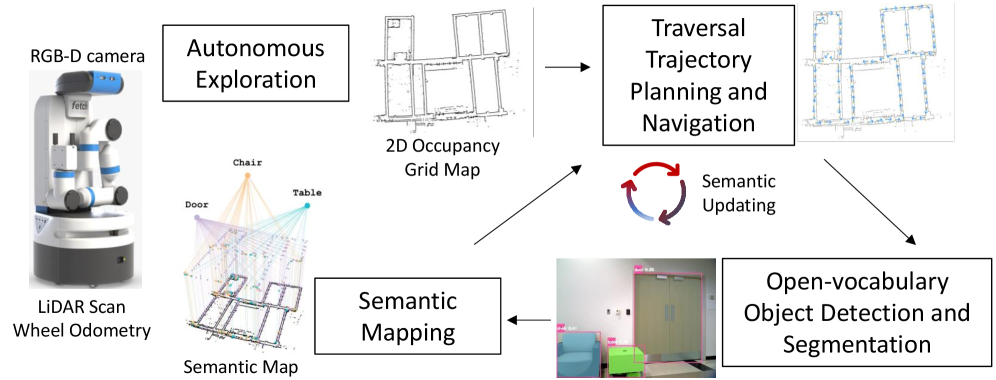
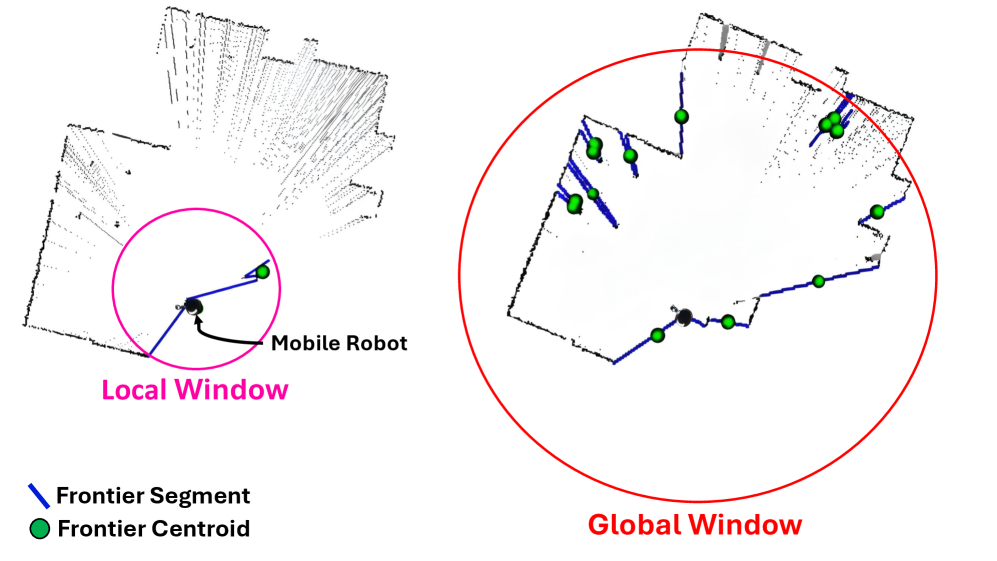
技术框架:该系统包含两个主要阶段:1) 几何地图构建阶段:使用改进的基于前沿的探索算法,结合动态搜索窗口,构建2D占据栅格地图。该阶段可以与任何度量SLAM框架集成。2) 语义地图更新阶段:使用贪婪轨迹规划器,引导机器人重访环境,并利用开放词汇对象检测和分割算法来更新对象语义信息,构建拓扑语义图。这两个阶段可以循环执行,实现语义地图的持续更新。
关键创新:该论文的关键创新在于实现了端到端的自主语义地图构建和更新,无需人工干预或预先收集的数据集。通过将几何地图构建和语义地图更新解耦,并采用模块化的设计,该系统可以灵活地适应不同的环境和任务需求。此外,该系统还能够有效地处理环境中的动态变化,实现语义地图的长期维护。
关键设计:在几何地图构建阶段,采用了动态搜索窗口来提高探索效率。在语义地图更新阶段,使用了贪婪轨迹规划器来选择重访路径,并利用开放词汇对象检测和分割算法来识别和定位物体。具体的参数设置和网络结构选择取决于所使用的SLAM框架和对象检测/分割算法。
🖼️ 关键图片

📊 实验亮点
该方法在真实室内环境中进行了验证,环境面积分别约为8500平方米和117平方米。实验结果表明,该系统能够鲁棒地构建和更新语义地图,并有效地处理环境中的动态变化。该系统实现了探索、映射和语义更新的完全自主集成,无需人工干预,标志着机器人自主导航和环境理解领域的重要进展。
🎯 应用场景
该研究成果可应用于各种需要自主导航和环境理解的机器人应用场景,例如:智能家居、仓储物流、安防巡检、以及灾难救援等。通过构建和维护环境的语义地图,机器人可以更好地理解周围环境,从而实现更智能、更高效的自主导航和交互,提升工作效率和服务质量。
📄 摘要(原文)
We present a modular robotic system for autonomous exploration and semantic updating of large-scale unknown environments. Our approach enables a mobile robot to build, revisit, and update a hybrid semantic map that integrates a 2D occupancy grid for geometry with a topological graph for object semantics. Unlike prior methods that rely on manual teleoperation or precollected datasets, our two-phase approach achieves end-to-end autonomy: first, a modified frontier-based exploration algorithm with dynamic search windows constructs a geometric map; second, using a greedy trajectory planner, environments are revisited, and object semantics are updated using open-vocabulary object detection and segmentation. This modular system, compatible with any metric SLAM framework, supports continuous operation by efficiently updating the semantic graph to reflect short-term and long-term changes such as object relocation, removal, or addition. We validate the approach on a Fetch robot in real-world indoor environments of approximately $8,500$m$^2$ and $117$m$^2$, demonstrating robust and scalable semantic mapping and continuous adaptation, marking a fully autonomous integration of exploration, mapping, and semantic updating on a physical robot.