Toward a Predictive eXtended Reality Teleoperation System with Duo-Virtual Spaces
作者: Ziliang Zhang, Cong Liu, Hyoseung Kim
分类: cs.RO, cs.HC
发布日期: 2024-09-23
备注: 3 pages, 3 figures
💡 一句话要点
提出基于双虚拟空间的预测性扩展现实遥操作系统,优化延迟问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 扩展现实 遥操作 机器人 虚拟空间 延迟优化
📋 核心要点
- 现有XR遥操作系统在快速运动和精确操作任务中存在较大延迟,限制了其应用。
- 论文提出双虚拟空间设计,在用户侧虚拟空间本地化机器人和对象,降低感知延迟。
- 通过周期性地从机器人侧虚拟空间获取真实姿态,校准用户侧虚拟空间,保证操作精度。
📝 摘要(中文)
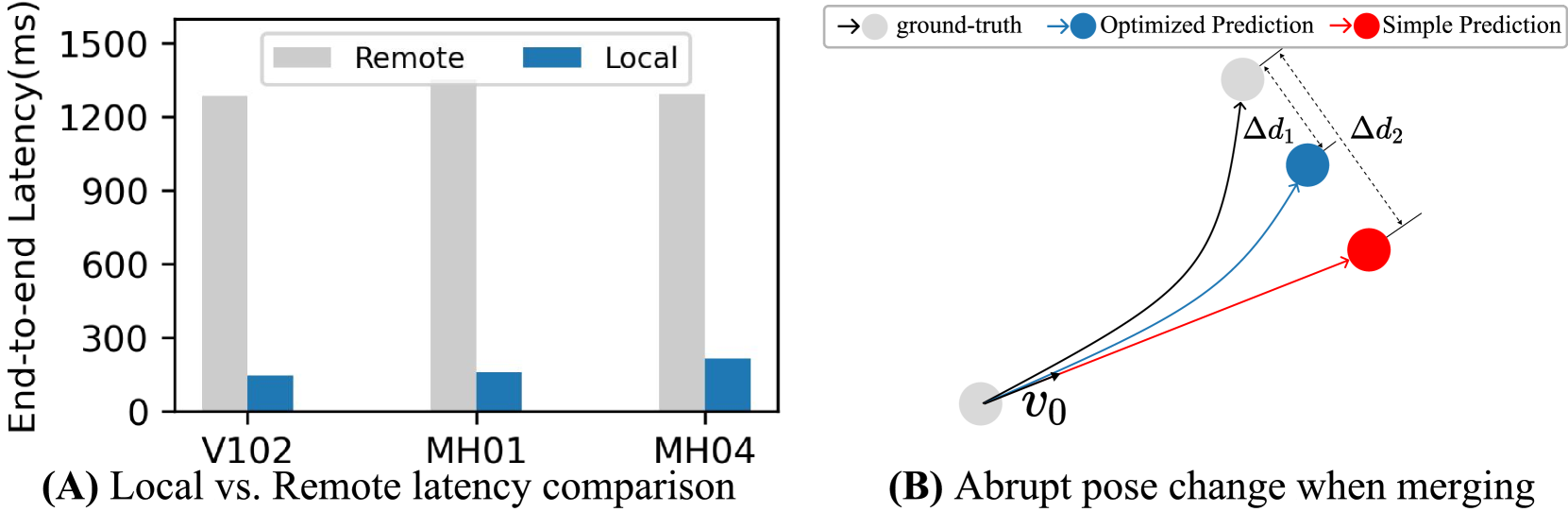
本文针对传统2D控制在机器人遥操作中交互性不足的问题,探索了扩展现实(XR)技术。现有XR遥操作系统在快速运动和精确操作任务中表现不佳,主要原因是用户运动与机器人反馈之间存在较大延迟。本文首先分析了现有XR遥操作系统的端到端延迟,然后提出了一种通过实现双虚拟空间设计来优化延迟的方案:将机器人和对象定位在用户侧的虚拟空间中,并通过机器人侧虚拟空间提供的周期性真实姿态进行校准。
🔬 方法详解
问题定义:现有XR遥操作系统由于存在较大的端到端延迟,导致在需要快速运动和精确操作的任务中性能不佳。用户在XR设备上的操作指令需要经过网络传输到机器人端,机器人执行动作后,反馈信息再传回用户端,这个过程中的延迟会严重影响用户的操作体验和任务完成效率。现有方法难以有效解决这一延迟问题。
核心思路:论文的核心思路是利用双虚拟空间设计来降低延迟。具体来说,就是在用户侧创建一个虚拟空间,将机器人和操作对象都放置在这个虚拟空间中。用户的操作直接作用于用户侧虚拟空间中的机器人,从而减少了因网络传输带来的延迟。同时,为了保证操作的精度,论文还利用机器人侧的虚拟空间提供的周期性真实姿态对用户侧的虚拟空间进行校准。
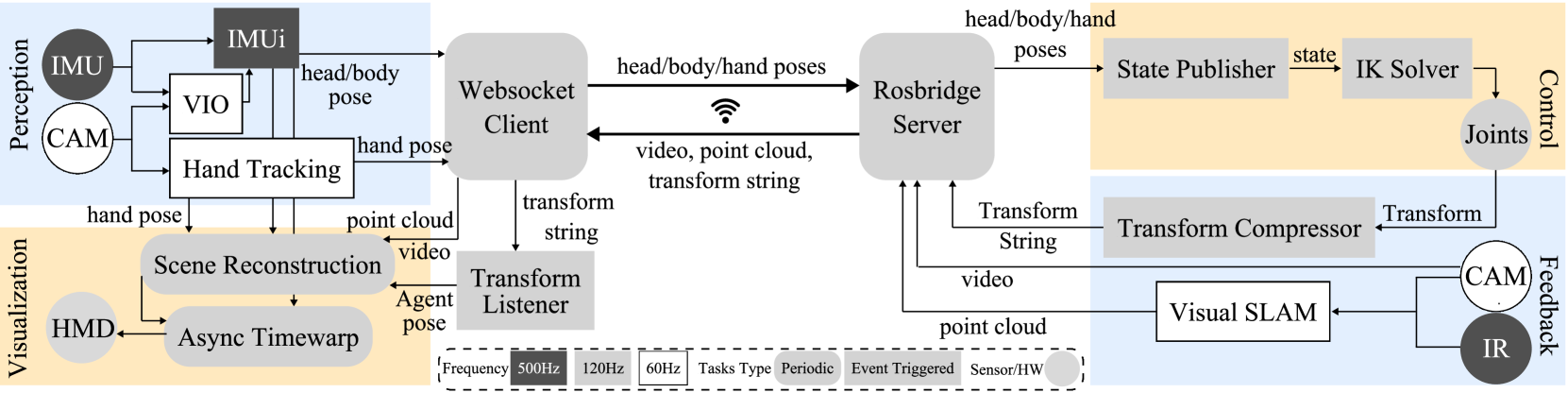
技术框架:该系统的整体架构包含两个主要的虚拟空间:用户侧虚拟空间和机器人侧虚拟空间。用户通过XR设备与用户侧虚拟空间进行交互,该空间包含机器人的虚拟模型和操作对象的虚拟模型。机器人侧虚拟空间则与真实的机器人相对应,提供机器人的真实姿态信息。系统周期性地将机器人侧的真实姿态信息传递到用户侧,用于校准用户侧虚拟空间中的机器人模型。
关键创新:该论文的关键创新在于提出了双虚拟空间的设计理念,并将其应用于XR遥操作系统中。通过在用户侧本地化机器人和操作对象,有效地降低了操作延迟,提高了系统的响应速度。同时,利用机器人侧的真实姿态信息进行周期性校准,保证了操作的精度。这种设计思路与传统的遥操作系统有本质区别,传统系统依赖于实时的网络传输,而该系统则更加注重本地化的操作和周期性的校准。
关键设计:论文中关键的设计包括:1) 如何在用户侧虚拟空间中准确地模拟机器人的运动学和动力学特性,使其能够真实地反映用户的操作意图;2) 如何选择合适的校准周期,以在延迟和精度之间取得平衡;3) 如何有效地融合来自机器人侧的真实姿态信息,并将其应用到用户侧虚拟空间的校准过程中。具体的参数设置、损失函数和网络结构等技术细节在论文中可能没有详细描述,属于未来的研究方向。
🖼️ 关键图片

📊 实验亮点
由于论文摘要中没有提供具体的实验结果和性能数据,因此无法总结实验亮点。需要阅读论文全文才能了解具体的实验设置、对比基线以及性能提升幅度。目前已知的是,该研究旨在通过双虚拟空间设计来优化XR遥操作系统的延迟问题,并提高操作精度。
🎯 应用场景
该研究成果可应用于多种需要远程操作的场景,例如:危险环境下的机器人操作(核电站、化工厂等)、太空探索、深海作业、远程医疗手术等。通过降低操作延迟,提高操作精度,可以显著提升远程操作的效率和安全性,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Extended Reality (XR) provides a more intuitive interaction method for teleoperating robots compared to traditional 2D controls. Recent studies have laid the groundwork for usable teleoperation with XR, but it fails in tasks requiring rapid motion and precise manipulations due to the large delay between user motion and agent feedback. In this work, we profile the end-to-end latency in a state-of-the-art XR teleoperation system and propose our idea to optimize the latency by implementing a duo-virtual spaces design and localizing the agent and objects in the user-side virtual space, while calibrating with periodic ground-truth poses from the agent-side virtual space.