Geometric Design and Gait Co-Optimization for Soft Continuum Robots Swimming at Low and High Reynolds Numbers
作者: Yanhao Yang, Ross L. Hatton
分类: cs.RO
发布日期: 2024-09-23 (更新: 2025-04-27)
备注: 6 pages + references, 6 figures, supplementary video: https://youtu.be/eAmjk_dobHk, accepted to the 2025 IEEE International Conference on Robotics and Automation (ICRA 2025)
💡 一句话要点
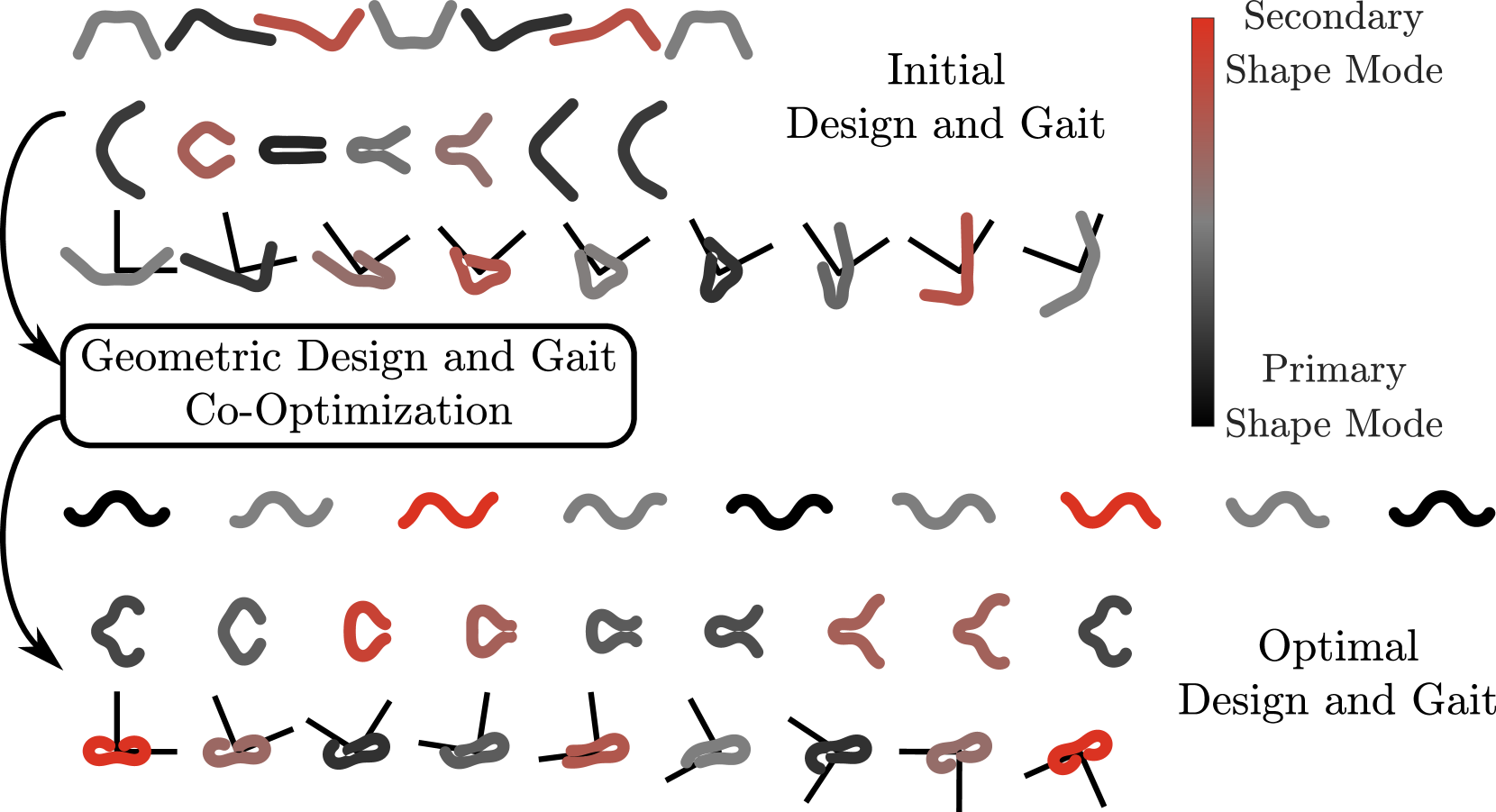
提出基于几何力学的软体连续游泳机器人设计与控制协同优化框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 连续体机器人 几何力学 运动规划 协同优化
📋 核心要点
- 软体驱动器的进步使软体游泳机器人能更高效地模仿真实海洋生物,但其设计与控制优化仍是挑战。
- 论文提出基于几何力学的协同优化框架,适用于低雷诺数和高雷诺数环境,实现设计与步态的联合优化。
- 实验表明,优化后的设计和步态在不同雷诺数下均优于传统设计,效率接近甚至超越更复杂的机器人。
📝 摘要(中文)
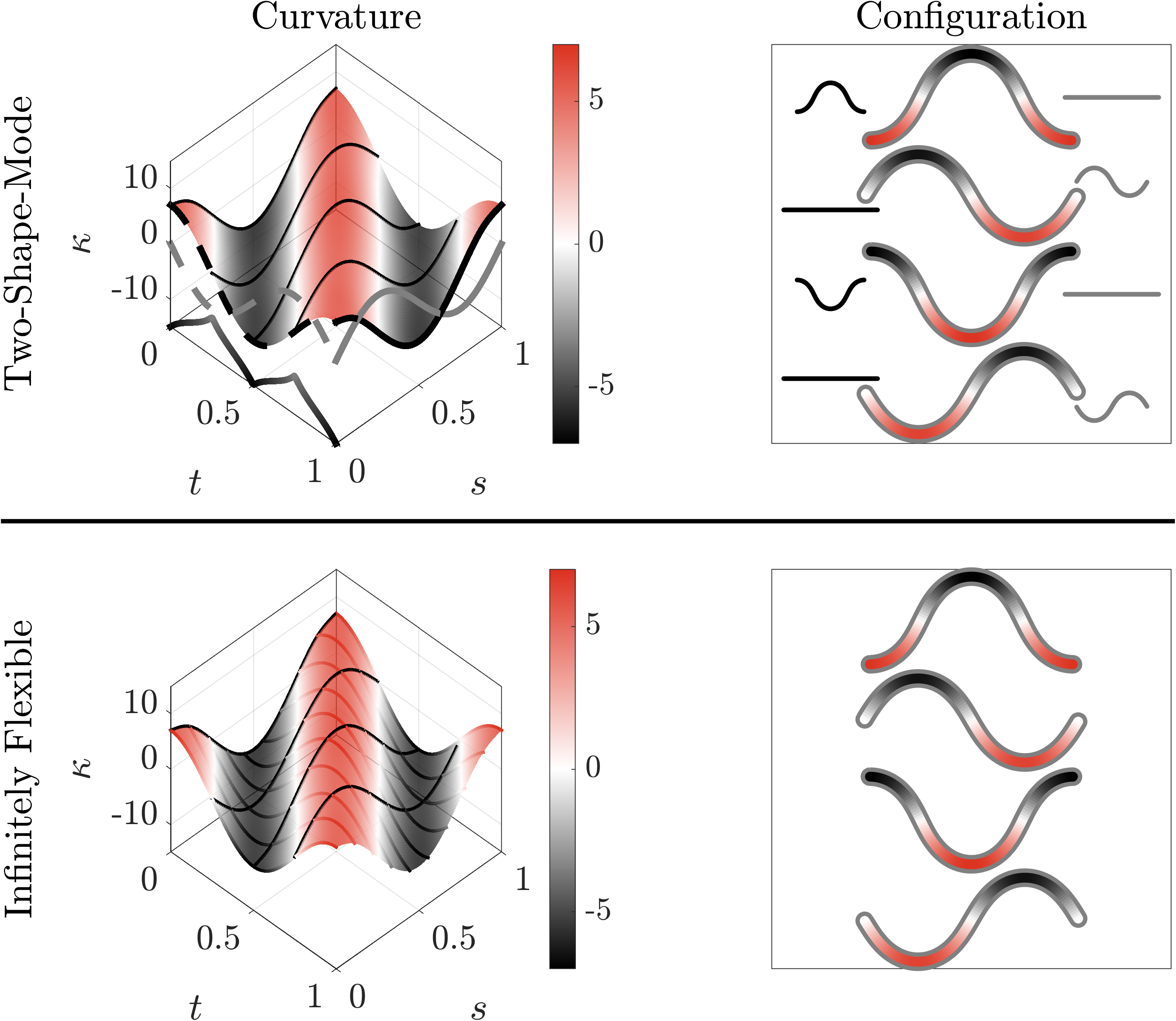
本文提出了一种软体连续游泳机器人的设计与控制协同优化实用框架。该框架从几何运动分析的角度出发,基于几何力学原理,同时考虑了低雷诺数和高雷诺数下的游泳情况。通过将几何原理推广到连续体,实现了设计和步态的高效几何变分协同优化,优化目标包括不同的功耗指标和游泳环境。结果表明,与具有相同自由度的三连杆或蛇形游泳机器人相比,所得到的优化设计和步态在低雷诺数和高雷诺数下都表现出更高的效率,接近甚至超过了无限灵活的游泳机器人和具有更高自由度的游泳机器人的效率。
🔬 方法详解
问题定义:论文旨在解决软体连续游泳机器人的设计和控制协同优化问题。现有方法难以在不同雷诺数下实现高效的游泳性能,并且缺乏对连续体几何力学的有效利用。传统方法通常依赖于试错法或简化模型,难以找到全局最优的设计和控制策略。
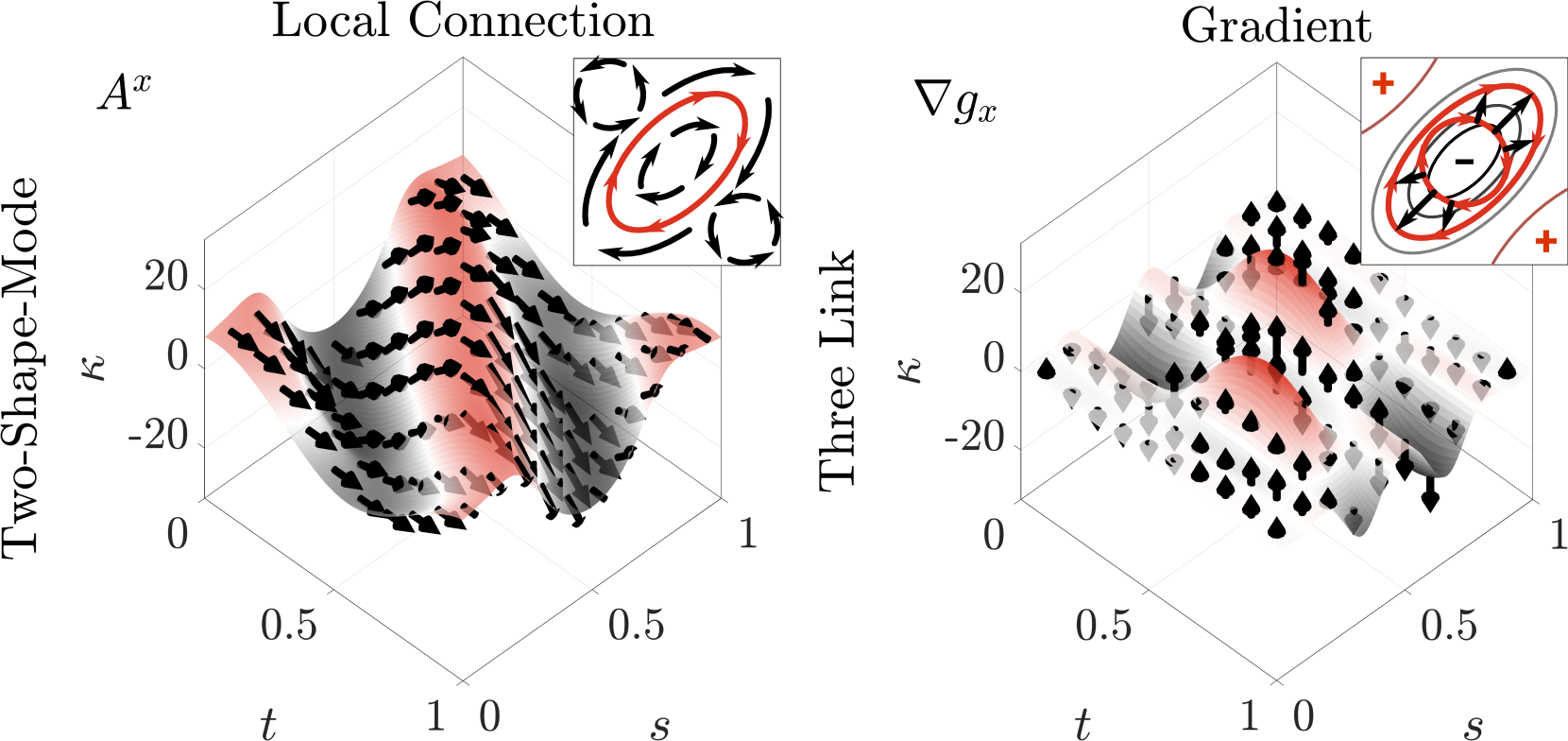
核心思路:论文的核心思路是将几何力学原理推广到连续体,并利用几何变分法实现设计和步态的协同优化。通过将机器人的运动分解为形状空间和位姿空间的变化,可以利用几何相位来描述机器人的运动规律,从而实现高效的优化。这种方法能够同时考虑低雷诺数和高雷诺数下的流体动力学效应。
技术框架:该框架包含以下主要模块:1) 连续体几何建模:使用几何方法描述软体机器人的形状和运动;2) 流体动力学建模:建立低雷诺数和高雷诺数下的流体动力学模型;3) 几何变分优化:利用几何变分法,对机器人的设计参数和控制步态进行协同优化;4) 性能评估:评估优化后的机器人在不同环境下的游泳性能。
关键创新:论文最重要的技术创新在于将几何力学原理推广到连续体,并实现了设计和步态的几何变分协同优化。与现有方法相比,该方法能够更有效地利用机器人的几何特性,从而实现更高的游泳效率。此外,该方法还能够同时考虑低雷诺数和高雷诺数下的流体动力学效应,从而适用于更广泛的应用场景。
关键设计:论文的关键设计包括:1) 连续体几何模型的参数化表示;2) 基于几何相位的运动规划;3) 考虑功耗和游泳速度的优化目标函数;4) 适用于不同雷诺数的流体动力学模型。具体的参数设置和优化算法的选择取决于具体的机器人设计和应用场景。
🖼️ 关键图片
📊 实验亮点
实验结果表明,通过几何变分协同优化,软体游泳机器人在低雷诺数和高雷诺数下均表现出更高的游泳效率。与具有相同自由度的三连杆或蛇形游泳机器人相比,优化后的设计和步态的效率提升显著,接近甚至超过了无限灵活的游泳机器人和具有更高自由度的游泳机器人的效率。具体性能数据未知,但论文强调了效率的显著提升。
🎯 应用场景
该研究成果可应用于水下探测、环境监测、水下救援等领域。通过优化软体游泳机器人的设计和控制,可以提高其在复杂水域环境中的运动能力和作业效率。未来,该技术有望应用于生物医学工程领域,例如开发微型软体机器人用于体内药物输送和微创手术。
📄 摘要(原文)
Recent advancements in soft actuators have enabled soft continuum swimming robots to achieve higher efficiency and more closely mimic the behaviors of real marine animals. However, optimizing the design and control of these soft continuum robots remains a significant challenge. In this paper, we present a practical framework for the co-optimization of the design and control of soft continuum robots, approached from a geometric locomotion analysis perspective. This framework is based on the principles of geometric mechanics, accounting for swimming at both low and high Reynolds numbers. By generalizing geometric principles to continuum bodies, we achieve efficient geometric variational co-optimization of designs and gaits across different power consumption metrics and swimming environments. The resulting optimal designs and gaits exhibit greater efficiencies at both low and high Reynolds numbers compared to three-link or serpenoid swimmers with the same degrees of freedom, approaching or even surpassing the efficiencies of infinitely flexible swimmers and those with higher degrees of freedom.