Terrain-Aware Model Predictive Control of Heterogeneous Bipedal and Aerial Robot Coordination for Search and Rescue Tasks
作者: Abdulaziz Shamsah, Jesse Jiang, Ziwon Yoon, Samuel Coogan, Ye Zhao
分类: cs.RO
发布日期: 2024-09-23
备注: 7 pages, 4 figures
💡 一句话要点
提出地形感知MPC,用于异构双足与无人机协同搜救任务
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 模型预测控制 地形感知 异构机器人 搜救任务 高斯过程
📋 核心要点
- 现有搜救任务中,人形机器人虽擅长复杂地形,但缺乏有效利用地形信息进行安全导航的策略。
- 提出地形感知MPC,利用高斯过程学习地形梯度,优化双足机器人路径,并协调无人机进行空中搜索。
- 仿真结果验证了该框架在复杂地形和不确定环境下的有效性,能够实现异构机器人团队的协同搜救。
📝 摘要(中文)
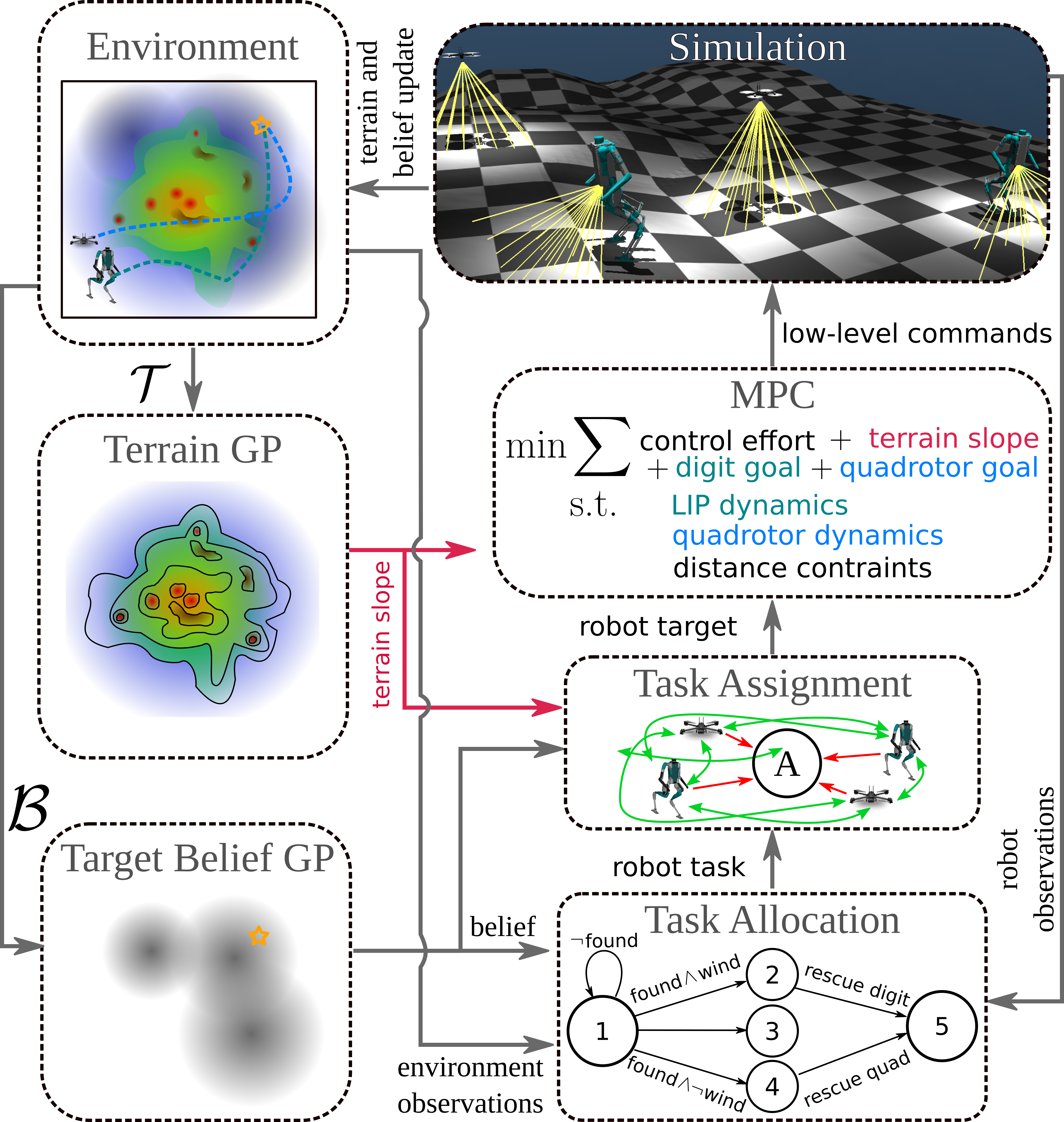
本研究提出了一种用于搜救任务的任务和运动规划框架,该框架使用由人形机器人和无人机组成的异构机器人团队。我们提出了一种地形感知模型预测控制器(MPC),该控制器结合了使用高斯过程(GP)学习的地形高程梯度。这种地形感知MPC为双足机器人生成安全导航路径,使其能够穿越崎岖地形,同时最大限度地减少地形坡度,并指导四旋翼飞行器执行空中搜索和测绘任务。救援对象的地点由目标置信度GP估计,该GP在地图探索期间在线更新。通过使用句法上安全的线性时序逻辑(scLTL)编码导航任务来设计用于任务分配的高级规划器,并设计了一种基于共识的算法用于单个机器人的任务分配。我们在具有各种地形和随机救援对象位置的不确定环境中的仿真中评估了我们的规划框架的有效性。
🔬 方法详解
问题定义:现有搜救任务中,人形机器人虽然具备在复杂地形中行动的能力,但缺乏有效利用地形信息进行安全导航的策略。尤其是在崎岖地形中,如何规划出安全且高效的路径,同时协调无人机进行空中搜索,是一个挑战。现有方法可能无法充分利用地形信息,导致导航效率低下或存在安全风险。
核心思路:本论文的核心思路是利用地形感知模型预测控制(MPC),结合高斯过程(GP)学习的地形高程梯度信息,为双足机器人生成安全导航路径,同时协调无人机进行空中搜索和测绘。通过预测机器人未来的状态并考虑地形约束,优化机器人的运动轨迹,使其能够安全高效地穿越崎岖地形。
技术框架:该框架包含以下主要模块:1) 地形高程梯度学习模块,使用高斯过程(GP)学习地形信息;2) 地形感知模型预测控制器(MPC),根据地形信息生成双足机器人的安全导航路径;3) 无人机控制模块,控制无人机进行空中搜索和测绘;4) 目标置信度GP估计模块,用于估计救援对象的位置;5) 高级规划器,使用句法上安全的线性时序逻辑(scLTL)编码导航任务,并进行任务分配;6) 基于共识的任务分配算法,用于单个机器人的任务分配。
关键创新:该论文的关键创新在于提出了地形感知的模型预测控制(MPC)方法,该方法能够有效地利用地形信息,为双足机器人生成安全导航路径。与传统的MPC方法相比,该方法考虑了地形高程梯度,能够更好地适应崎岖地形。此外,该框架还结合了高斯过程(GP)学习、无人机控制和任务分配等技术,实现了异构机器人团队的协同搜救。
关键设计:地形感知MPC的关键设计在于将地形高程梯度信息融入到MPC的优化目标中。具体来说,MPC的目标函数包括最小化地形坡度、最小化控制输入和最大化与目标点的接近程度等项。高斯过程(GP)用于学习地形高程梯度,并提供不确定性估计。高级规划器使用句法上安全的线性时序逻辑(scLTL)编码导航任务,并使用基于共识的算法进行任务分配。
🖼️ 关键图片


📊 实验亮点
论文在仿真环境中验证了所提出框架的有效性。仿真结果表明,该框架能够有效地利用地形信息,为双足机器人生成安全导航路径,并协调无人机进行空中搜索。与没有地形感知的MPC相比,地形感知MPC能够显著提高机器人的导航效率和安全性。具体的性能数据(例如,导航时间、成功率等)在论文中进行了详细的分析。
🎯 应用场景
该研究成果可应用于各种搜救场景,例如地震灾害、山地救援等。通过异构机器人团队的协同工作,可以提高搜救效率,降低搜救人员的风险。此外,该技术还可以应用于其他需要机器人进行复杂地形导航的领域,例如矿山勘探、环境监测等。未来,该技术有望进一步发展,实现更智能、更自主的机器人搜救系统。
📄 摘要(原文)
Humanoid robots offer significant advantages for search and rescue tasks, thanks to their capability to traverse rough terrains and perform transportation tasks. In this study, we present a task and motion planning framework for search and rescue operations using a heterogeneous robot team composed of humanoids and aerial robots. We propose a terrain-aware Model Predictive Controller (MPC) that incorporates terrain elevation gradients learned using Gaussian processes (GP). This terrain-aware MPC generates safe navigation paths for the bipedal robots to traverse rough terrain while minimizing terrain slopes, and it directs the quadrotors to perform aerial search and mapping tasks. The rescue subjects' locations are estimated by a target belief GP, which is updated online during the map exploration. A high-level planner for task allocation is designed by encoding the navigation tasks using syntactically cosafe Linear Temporal Logic (scLTL), and a consensus-based algorithm is designed for task assignment of individual robots. We evaluate the efficacy of our planning framework in simulation in an uncertain environment with various terrains and random rescue subject placements.