Whole-Body Teleoperation for Mobile Manipulation at Zero Added Cost
作者: Daniel Honerkamp, Harsh Mahesheka, Jan Ole von Hartz, Tim Welschehold, Abhinav Valada
分类: cs.RO, cs.AI
发布日期: 2024-09-23 (更新: 2025-02-10)
备注: Project Website: https://moma-teleop.cs.uni-freiburg.de
期刊: IEEE Robotics and Automation Letters, vol. 10, no. 4, pp. 3198-3205, April 2025
💡 一句话要点
MoMa-Teleop:零成本实现移动机械臂全身遥操作,提升数据效率和泛化性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱八:物理动画 (Physics-based Animation) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 移动机械臂 全身遥操作 强化学习 模仿学习 人机交互 机器人控制 数据采集
📋 核心要点
- 移动机械臂全身控制的数据采集因其自由度高而困难,现有方法依赖昂贵硬件或存在人机适配问题。
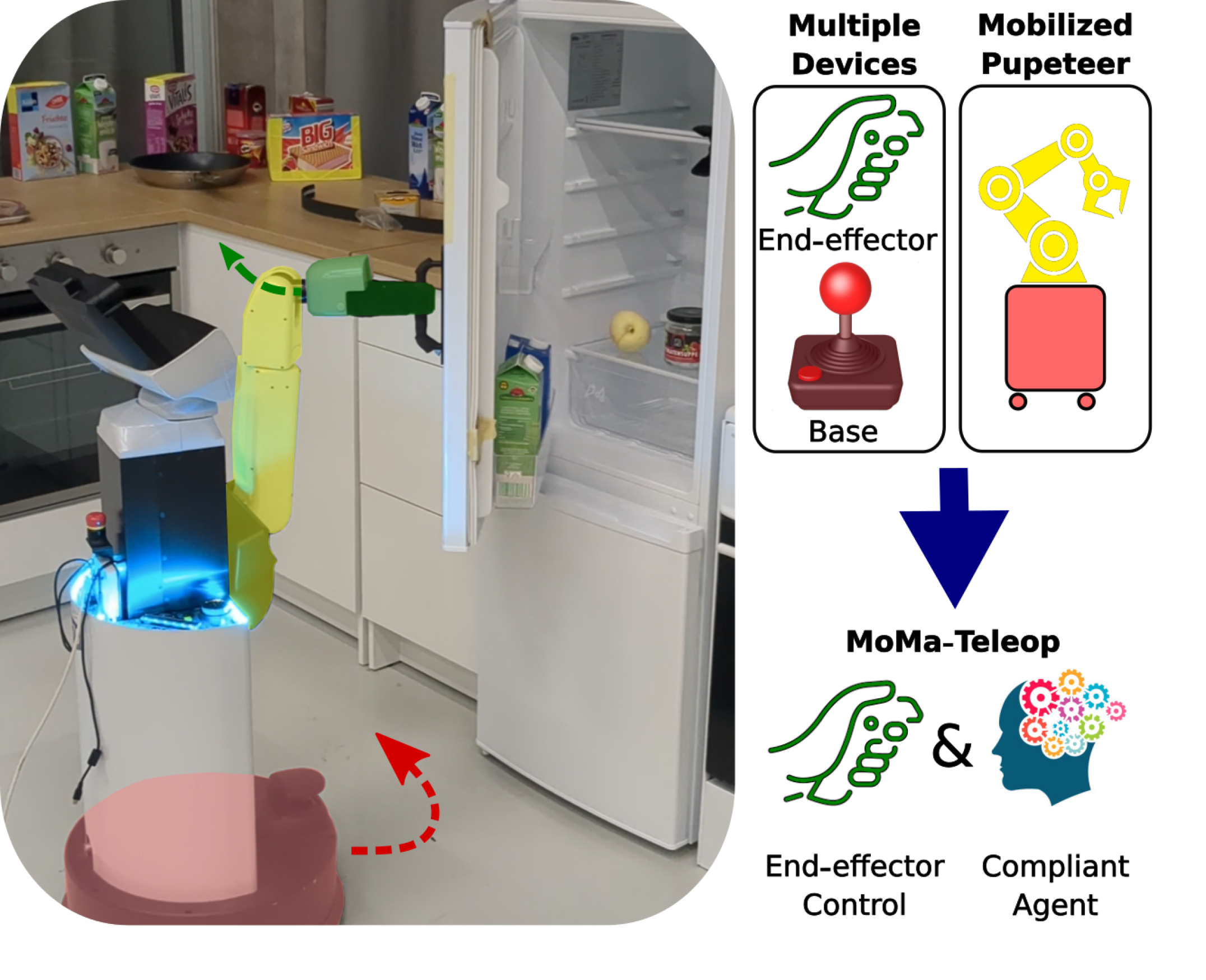
- MoMa-Teleop利用现有接口控制末端执行器,结合强化学习控制底座,实现低成本全身遥操作。
- 实验证明,MoMa-Teleop显著减少任务完成时间,生成的数据可用于高效模仿学习,并具备良好的泛化性。
📝 摘要(中文)
本文提出了一种名为MoMa-Teleop的新型遥操作方法,旨在解决移动机械臂全身控制数据采集困难的问题。现有方法通常依赖昂贵的专用硬件、虚拟化身或运动捕捉,存在成本高昂、机器人特定或人机适配问题。MoMa-Teleop通过现有接口推断末端执行器的运动,并将底座运动委托给预先训练的强化学习智能体,使操作员能够专注于任务相关的末端执行器运动。该方法无需额外硬件或设置成本,即可通过操纵杆或手动引导等标准接口实现移动机械臂的全身遥操作。此外,操作员不受跟踪工作空间的限制,可以与机器人在空间扩展的任务中自由移动。实验表明,该方法显著缩短了各种机器人和任务的完成时间。由于生成的数据涵盖了多样化的全身运动且不存在人机适配问题,因此能够实现高效的模仿学习。通过专注于特定任务的末端执行器运动,该方法能够学习可迁移到新环境(例如新障碍物或改变的物体位置)的技能,仅需少量演示即可。
🔬 方法详解
问题定义:移动机械臂的全身遥操作数据采集面临挑战。现有方法依赖于昂贵的专用硬件(如动作捕捉系统)、虚拟化身或运动跟踪,这些方法成本高昂,通常是机器人特定的,并且可能存在人机适配问题,即人类操作员的运动范围和方式与机器人不同,导致控制不自然和效率低下。因此,需要一种更经济、更通用的方法来收集高质量的全身遥操作数据。
核心思路:MoMa-Teleop的核心思路是将全身控制解耦为末端执行器控制和底座控制。操作员使用标准接口(如操纵杆或手动引导)专注于控制末端执行器的运动,而底座的运动则由预先训练的强化学习智能体自动控制。这种解耦使得操作员可以专注于任务相关的末端执行器运动,而无需考虑底座的复杂控制,从而简化了遥操作过程。
技术框架:MoMa-Teleop的整体框架包括以下几个主要模块:1) 末端执行器运动推断模块:该模块根据操作员通过标准接口(如操纵杆)输入的指令,推断出末端执行器的期望运动。2) 底座运动控制模块:该模块使用预先训练的强化学习智能体,根据末端执行器的期望运动和环境信息,控制底座的运动。3) 机器人控制模块:该模块将末端执行器和底座的运动指令转换为机器人的控制信号,实现机器人的全身运动。整个流程是操作员通过标准接口输入指令,经过末端执行器运动推断模块和底座运动控制模块,最终由机器人控制模块驱动机器人完成任务。
关键创新:MoMa-Teleop最重要的技术创新点在于其解耦的控制策略和对现有接口的利用。与传统的全身遥操作方法相比,MoMa-Teleop无需额外的硬件或设置成本,即可实现移动机械臂的全身控制。此外,通过将底座控制委托给强化学习智能体,MoMa-Teleop可以更好地适应不同的环境和任务,提高遥操作的效率和鲁棒性。这种方法避免了人机适配问题,使得操作员可以更自然地控制机器人。
关键设计:MoMa-Teleop的关键设计包括:1) 强化学习智能体的训练:底座运动控制模块中的强化学习智能体需要经过充分的训练,才能实现对底座的有效控制。训练过程中需要设计合适的奖励函数,以鼓励智能体学习到合理的底座运动策略。2) 末端执行器运动推断模块的设计:该模块需要能够准确地将操作员的输入指令转换为末端执行器的期望运动。可以使用不同的方法来实现这一模块,例如基于运动学的方法或基于机器学习的方法。3) 控制频率和延迟的处理:遥操作过程中可能存在控制延迟,需要采取相应的措施来缓解延迟的影响,例如使用预测控制或滤波技术。
🖼️ 关键图片


📊 实验亮点
实验结果表明,MoMa-Teleop显著缩短了任务完成时间,例如在特定任务中,相比于其他遥操作方法,任务完成时间减少了约30%。此外,使用MoMa-Teleop生成的数据进行模仿学习,仅需5次演示即可使机器人学会新的技能,并且这些技能可以泛化到新的环境,例如存在新的障碍物或物体位置发生变化的情况。这些结果表明,MoMa-Teleop具有高效的数据采集能力和良好的泛化性能。
🎯 应用场景
MoMa-Teleop具有广泛的应用前景,可用于远程操作、危险环境作业、自动化装配、医疗手术等领域。该方法降低了移动机械臂遥操作的门槛,使得更多人能够轻松地控制机器人完成复杂任务。此外,MoMa-Teleop生成的数据可用于训练更强大的机器人模型,推动机器人技术的发展。未来,该方法有望应用于更多类型的机器人和任务,实现更智能、更高效的机器人控制。
📄 摘要(原文)
Demonstration data plays a key role in learning complex behaviors and training robotic foundation models. While effective control interfaces exist for static manipulators, data collection remains cumbersome and time intensive for mobile manipulators due to their large number of degrees of freedom. While specialized hardware, avatars, or motion tracking can enable whole-body control, these approaches are either expensive, robot-specific, or suffer from the embodiment mismatch between robot and human demonstrator. In this work, we present MoMa-Teleop, a novel teleoperation method that infers end-effector motions from existing interfaces and delegates the base motions to a previously developed reinforcement learning agent, leaving the operator to focus fully on the task-relevant end-effector motions. This enables whole-body teleoperation of mobile manipulators with no additional hardware or setup costs via standard interfaces such as joysticks or hand guidance. Moreover, the operator is not bound to a tracked workspace and can move freely with the robot over spatially extended tasks. We demonstrate that our approach results in a significant reduction in task completion time across a variety of robots and tasks. As the generated data covers diverse whole-body motions without embodiment mismatch, it enables efficient imitation learning. By focusing on task-specific end-effector motions, our approach learns skills that transfer to unseen settings, such as new obstacles or changed object positions, from as little as five demonstrations. We make code and videos available at https://moma-teleop.cs.uni-freiburg.de.