Efficient Collision Detection Framework for Enhancing Collision-Free Robot Motion
作者: Xiankun Zhu, Yucheng Xin, Shoujie Li, Houde Liu, Chongkun Xia, Bin Liang
分类: cs.RO
发布日期: 2024-09-23
💡 一句话要点
提出基于SDF的机器人高效碰撞检测框架,加速无碰撞运动规划。
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion) 支柱五:交互与反应 (Interaction & Reaction)
关键词: 碰撞检测 机器人运动规划 Signed Distance Field 自碰撞检测 实时性 可微性 运动控制
📋 核心要点
- 现有碰撞检测方法在机器人运动规划中效率较低,难以满足实时性要求,尤其是在复杂环境中。
- 该论文提出一种基于Signed Distance Field (SDF)的碰撞检测框架,并集成自碰撞检测模块,加速碰撞检测过程。
- 实验结果表明,该框架在保持高精度的前提下,推理速度比现有方法快五倍,并在Franka机器人手臂上验证了有效性。
📝 摘要(中文)
本文提出了一种高效的碰撞检测框架,用于提升机器人运动生成的速度。该框架基于机器人Signed Distance Field (SDF),并无缝集成了自碰撞检测模块。首先,利用前向运动学分解机器人的SDF,并使用多个轻量级网络并行逼近SDF,从而提高计算效率。其次,引入支持向量机将自碰撞检测模块集成到框架中,称为SDF-SC框架。通过统计特征,统一了SDF和自碰撞检测的碰撞距离表示。在此过程中,保持并利用框架的可微性来优化无碰撞机器人轨迹。最后,开发了一个基于该框架的反应式运动控制器,能够实时避开多个动态障碍物。在保持高精度的同时,该框架的推理速度比以前的方法快五倍。在Franka机器人手臂上的实验结果证明了该方法的有效性。
🔬 方法详解
问题定义:论文旨在解决机器人运动规划中碰撞检测效率低下的问题。现有的碰撞检测方法,尤其是在处理复杂环境和机器人自碰撞时,计算量大,难以满足实时性要求,限制了机器人运动规划的速度和灵活性。
核心思路:论文的核心思路是利用Signed Distance Field (SDF) 来表示机器人与环境的距离信息,并通过轻量级神经网络并行逼近SDF,从而加速碰撞检测过程。同时,将自碰撞检测模块集成到SDF框架中,统一碰撞距离的表示,并保持框架的可微性,以便于优化无碰撞轨迹。
技术框架:该框架主要包含以下几个模块:1) 基于前向运动学的SDF分解模块,将机器人的SDF分解为多个部分;2) 并行SDF逼近模块,使用多个轻量级神经网络并行计算SDF;3) 基于支持向量机(SVM)的自碰撞检测模块,用于检测机器人自身的碰撞;4) 碰撞距离统一表示模块,使用统计特征统一SDF和自碰撞检测的碰撞距离表示;5) 基于梯度的轨迹优化模块,利用框架的可微性优化无碰撞轨迹;6) 反应式运动控制器,用于实时避开动态障碍物。
关键创新:该论文的关键创新在于:1) 使用多个轻量级神经网络并行逼近SDF,显著提高了SDF的计算效率;2) 将自碰撞检测模块集成到SDF框架中,统一了碰撞距离的表示,简化了碰撞检测流程;3) 保持了框架的可微性,便于使用梯度优化方法优化无碰撞轨迹。
关键设计:论文中一些关键的设计包括:1) 使用前向运动学分解SDF,降低了单个网络的复杂度;2) 使用轻量级神经网络(具体网络结构未知)进行SDF逼近,减少了计算量;3) 使用支持向量机(SVM)进行自碰撞检测模块的集成,利用其分类能力判断是否发生自碰撞;4) 使用统计特征(具体特征未知)统一SDF和自碰撞检测的碰撞距离表示;5) 基于梯度下降的轨迹优化算法(具体算法未知),利用框架的可微性优化轨迹。
🖼️ 关键图片


📊 实验亮点
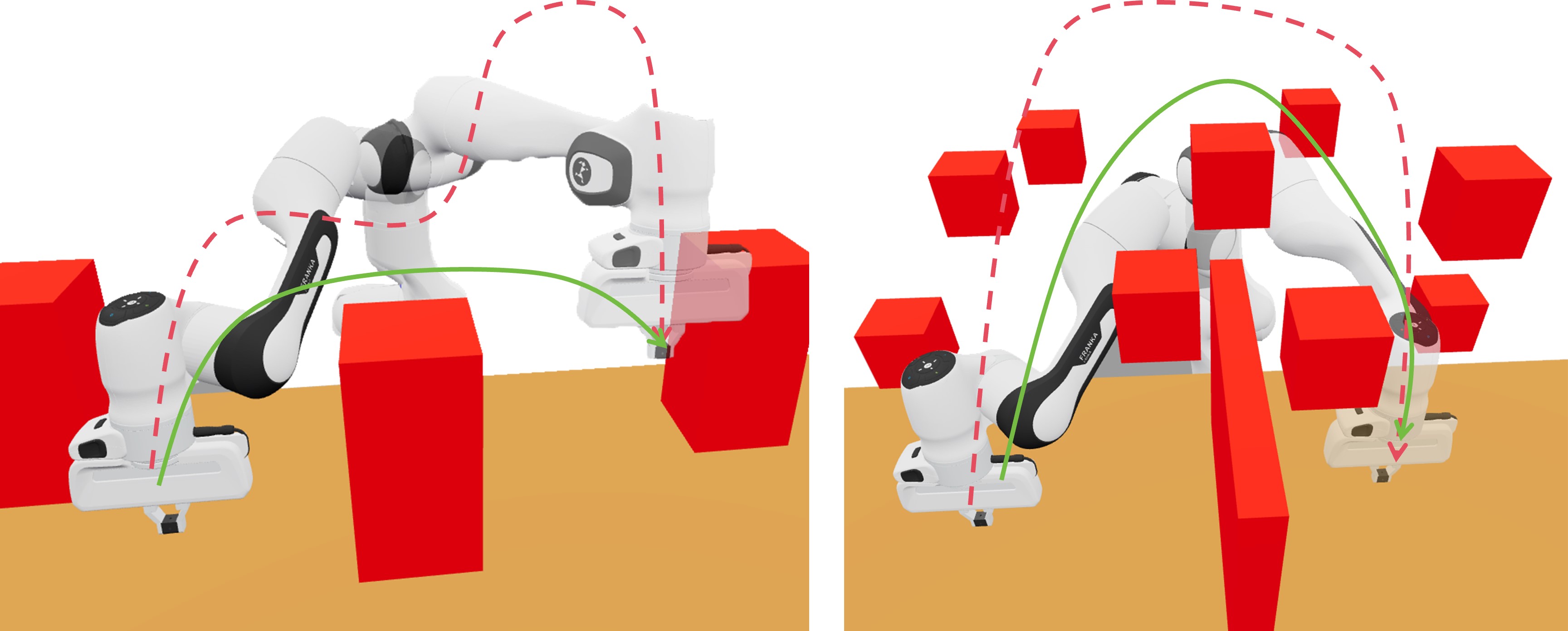
实验结果表明,该框架在Franka机器人手臂上实现了高效的碰撞检测,推理速度比以前的方法快五倍。在保持高精度的前提下,该框架能够实时避开多个动态障碍物,并优化无碰撞轨迹。这些结果验证了该方法的有效性,表明其在实际机器人应用中具有很大的潜力。
🎯 应用场景
该研究成果可应用于各种需要实时无碰撞运动规划的机器人应用场景,例如:工业机器人、服务机器人、自动驾驶车辆等。通过提高碰撞检测的效率,可以显著提升机器人的运动速度和灵活性,使其能够更好地适应复杂和动态的环境,从而提高生产效率和服务质量。未来,该框架可以进一步扩展到更复杂的机器人系统和环境,并与其他运动规划算法相结合,实现更高效、更安全的机器人运动。
📄 摘要(原文)
Fast and efficient collision detection is essential for motion generation in robotics. In this paper, we propose an efficient collision detection framework based on the Signed Distance Field (SDF) of robots, seamlessly integrated with a self-collision detection module. Firstly, we decompose the robot's SDF using forward kinematics and leverage multiple extremely lightweight networks in parallel to efficiently approximate the SDF. Moreover, we introduce support vector machines to integrate the self-collision detection module into the framework, which we refer to as the SDF-SC framework. Using statistical features, our approach unifies the representation of collision distance for both SDF and self-collision detection. During this process, we maintain and utilize the differentiable properties of the framework to optimize collision-free robot trajectories. Finally, we develop a reactive motion controller based on our framework, enabling real-time avoidance of multiple dynamic obstacles. While maintaining high accuracy, our framework achieves inference speeds up to five times faster than previous methods. Experimental results on the Franka robotic arm demonstrate the effectiveness of our approach.