Automatic Geometric Decomposition for Analytical Inverse Kinematics
作者: Daniel Ostermeier, Jonathan Külz, Matthias Althoff
分类: cs.RO
发布日期: 2024-09-23 (更新: 2025-08-21)
备注: Website: https://eaik.cps.cit.tum.de/
期刊: IEEE Robotics and Automation Letters (RA-L), Vol. 10, No. 10, pp. 9964--9971, 2025
💡 一句话要点
提出一种自动几何分解方法,实现亚毫秒级解析逆运动学求解
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 逆运动学 解析求解 几何分解 机器人运动学 自动推导
📋 核心要点
- 解析逆运动学求解精度高、效率高,但传统方法依赖人工推导,耗时且易出错,限制了其应用。
- 该论文提出一种自动几何分解方法,通过运动学分类将IK问题分解为预先求解的子问题,实现快速解析求解。
- 实验表明,该方法在IK推导速度上远超符号操作工具,求解速度和精度与IKFast等基线方法相当甚至更优。
📝 摘要(中文)
逆运动学(IK)计算是机器人学中的一个基本挑战。与数值或基于学习的方法相比,解析IK具有更高的效率和精度。然而,现有的解析方法在大多数应用中难以使用,因为它们需要在推导过程中投入大量的人力,数值上不稳定,或者依赖于耗时的符号操作。为此,我们提出了一种方法,首次实现了总耗时不到一毫秒的解析IK推导和计算。我们的工作基于对IK的自动在线分解,通过对相应机械臂的运动学分类,将其分解为预先求解的、数值稳定的子问题。在数值实验中,我们证明了我们的方法在IK推导方面比现有的采用符号操作的工具快几个数量级。在一次性推导之后,我们的方法在显式IK解决方案的计算速度和精度方面与IKFast等基线方法相匹配,甚至常常超过它们。最后,我们提供了一个开源的C++工具箱,带有Python封装器,大大降低了在快速原型设计和运动学机器人设计等应用中使用解析IK的门槛。
🔬 方法详解
问题定义:论文旨在解决机器人逆运动学解析求解的问题。现有解析方法依赖人工推导,过程繁琐耗时,且容易出错,难以应用于复杂的机器人结构。数值方法虽然可以求解,但精度和效率通常不如解析方法。因此,需要一种自动、高效、精确的解析逆运动学求解方法。
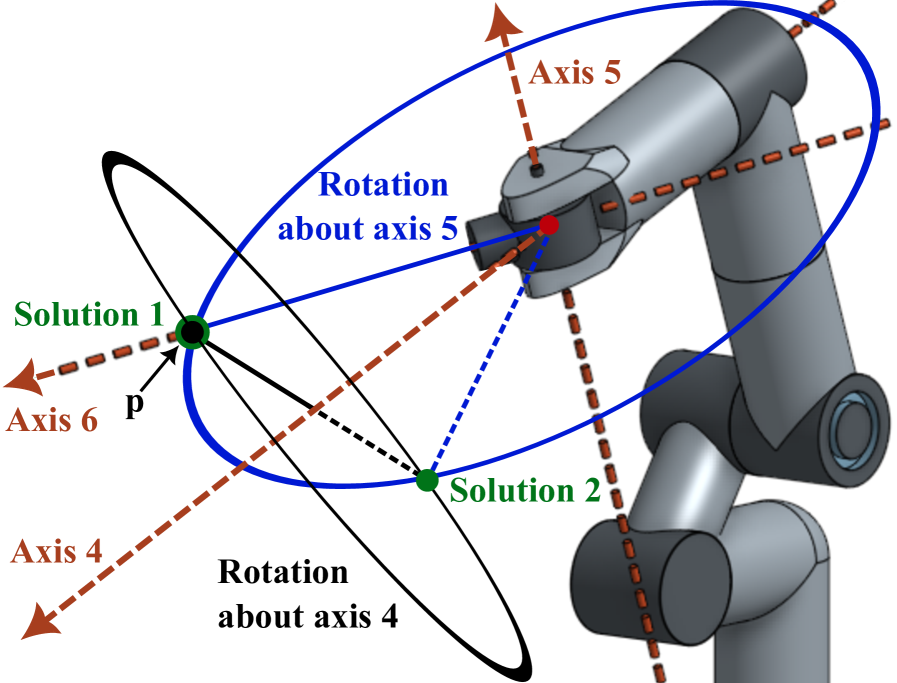
核心思路:论文的核心思路是将复杂的逆运动学问题分解为一系列预先求解的、数值稳定的子问题。通过对机器人运动学结构的分类,自动识别可以独立求解的子链,并利用几何关系将这些子问题的解组合起来,从而得到整体的逆运动学解。这种分解策略避免了复杂的符号推导,提高了求解效率和数值稳定性。
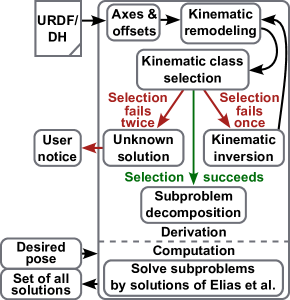
技术框架:该方法主要包含以下几个阶段:1) 机器人运动学结构的输入与表示;2) 运动学结构的自动分类,识别可分解的子链;3) 对每个子链进行解析求解,得到局部解;4) 利用几何关系将局部解组合成全局解;5) 对全局解进行优化和验证。整个过程无需人工干预,可以自动完成。
关键创新:该方法最重要的创新在于实现了逆运动学问题的自动几何分解。与传统的符号操作方法相比,该方法避免了复杂的符号推导,大大提高了求解速度。与数值方法相比,该方法可以得到解析解,具有更高的精度和稳定性。此外,该方法还提供了一个开源的C++工具箱,方便用户使用。
关键设计:论文中没有详细描述具体的参数设置、损失函数或网络结构,因为该方法主要基于几何分解和解析求解,而非机器学习。关键设计在于如何有效地对机器人运动学结构进行分类,以及如何将局部解组合成全局解。具体的实现细节可能涉及到一些几何算法和优化方法,但论文中没有给出详细的描述。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在IK推导速度上比现有符号操作工具快几个数量级,实现了亚毫秒级的推导速度。在IK求解速度和精度方面,该方法与IKFast等基线方法相当甚至更优。例如,在某些机器人模型上,该方法可以达到与IKFast相当的求解速度,同时保持更高的精度。
🎯 应用场景
该研究成果可广泛应用于机器人快速原型设计、运动学机器人设计、实时控制等领域。通过自动生成高效精确的解析逆运动学解,可以显著缩短机器人开发周期,提高控制精度和效率,并降低使用门槛。该方法还有望应用于虚拟现实、游戏等需要实时运动学计算的领域。
📄 摘要(原文)
Calculating the inverse kinematics (IK) is a fundamental challenge in robotics. Compared to numerical or learning-based approaches, analytical IK provides higher efficiency and accuracy. However, existing analytical approaches are difficult to use in most applications, as they require human ingenuity in the derivation process, are numerically unstable, or rely on time-consuming symbolic manipulation. In contrast, we propose a method that, for the first time, enables an analytical IK derivation and computation in less than a millisecond in total. Our work is based on an automatic online decomposition of the IK into pre-solved, numerically stable subproblems via a kinematic classification of the respective manipulator. In numerical experiments, we demonstrate that our approach is orders of magnitude faster in deriving the IK than existing tools that employ symbolic manipulation. Following this one-time derivation, our method matches and often surpasses baselines, such as IKFast, in terms of speed and accuracy during the computation of explicit IK solutions. Finally, we provide an open-source C++ toolbox with Python wrappers that substantially reduces the entry barrier to using analytical IK in applications like rapid prototyping and kinematic robot design.