Safe Navigation of Bipedal Robots via Koopman Operator-Based Model Predictive Control
作者: Jeonghwan Kim, Yunhai Han, Harish Ravichandar, Sehoon Ha
分类: cs.RO
发布日期: 2024-09-23 (更新: 2025-10-02)
备注: 8 pages
💡 一句话要点
提出基于Koopman算子的模型预测控制,实现双足机器人安全导航
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 双足机器人 安全导航 Koopman算子 模型预测控制 动态模式分解 深度强化学习 非线性控制
📋 核心要点
- 双足机器人导航因其复杂的全身运动和离散接触,即使在简单指令下也呈现非线性动力学,对传统控制算法构成挑战。
- 论文提出基于Koopman算子的模型预测控制框架,通过在高维空间学习线性化动力学,简化非线性控制问题。
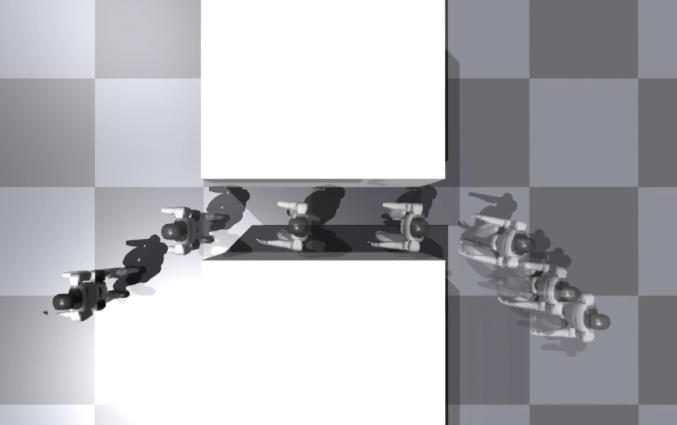
- 实验结果表明,该方法能更准确预测机器人轨迹,并在复杂环境中实现更高的导航安全性和成功率。
📝 摘要(中文)
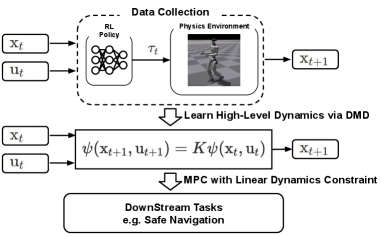
动力学非线性一直是机器人领域的重大挑战,常常导致现有控制算法的性能显著下降。例如,即使在简单的速度指令下,双足机器人的导航也会表现出非线性行为,因为它们的实际动力学受复杂的全身运动和离散接触控制。本文提出了一种受Koopman算子理论启发的新的安全导航框架。我们首先使用深度强化学习训练一个低级运动策略,然后通过使用动态模式分解在高维提升空间中学习线性化动力学来捕获其低频、基础级动力学。然后,我们的模型预测控制器(MPC)通过标准二次目标和提升空间中的线性动力学约束有效地优化控制信号。我们证明了基于Koopman的模型比基线方法更准确地预测双足机器人轨迹。此外,我们表明所提出的导航框架在具有狭窄通道的密集环境中实现了更高的安全性,并具有更好的成功率。
🔬 方法详解
问题定义:双足机器人的导航控制面临着严重的非线性动力学问题,这使得传统的控制算法难以准确预测机器人的运动轨迹,尤其是在复杂环境中。现有的方法往往难以在保证安全性的前提下,实现高效的导航。因此,需要一种能够有效处理非线性动力学,并能保证机器人安全性的导航控制方法。
核心思路:论文的核心思路是利用Koopman算子理论,将非线性动力学系统嵌入到一个高维线性空间中,从而将非线性控制问题转化为线性控制问题。通过在提升空间中学习线性化动力学模型,可以更准确地预测机器人的运动轨迹,并利用模型预测控制(MPC)算法进行优化控制。这种方法的核心在于利用Koopman算子将非线性系统线性化,从而简化控制问题的求解。
技术框架:该导航框架主要包含以下几个模块:1) 低级运动策略训练:使用深度强化学习训练一个低级运动策略,用于控制机器人的基本运动。2) 动力学模型学习:利用动态模式分解(DMD)方法,在高维提升空间中学习线性化动力学模型,该模型描述了机器人在低频运动下的动力学行为。3) 模型预测控制(MPC):使用学习到的线性化动力学模型,通过MPC算法优化控制信号,实现安全导航。MPC算法的目标是最小化控制成本,同时满足安全约束。
关键创新:该论文的关键创新在于将Koopman算子理论应用于双足机器人的导航控制。通过在高维提升空间中学习线性化动力学模型,可以更准确地预测机器人的运动轨迹,并利用MPC算法进行优化控制。与传统的基于非线性模型的控制方法相比,该方法具有更高的计算效率和更好的控制性能。此外,该方法还能够有效地处理非线性动力学问题,从而提高机器人在复杂环境中的导航安全性。
关键设计:在动力学模型学习阶段,使用动态模式分解(DMD)方法来学习线性化动力学模型。DMD方法通过对状态空间进行分解,提取主要的动力学模式,从而建立线性化模型。在MPC算法中,使用二次目标函数来最小化控制成本,并使用线性动力学模型作为约束条件。此外,还引入了安全约束,以保证机器人在导航过程中的安全性。具体的参数设置和网络结构在论文中未详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,基于Koopman算子的模型预测控制方法能够更准确地预测双足机器人的运动轨迹,并显著提高机器人在复杂环境中的导航安全性和成功率。具体而言,该方法在具有狭窄通道的密集环境中,相比于基线方法,实现了更高的成功率,并降低了碰撞风险。具体的性能提升数据在论文中未详细给出,属于未知信息。
🎯 应用场景
该研究成果可应用于各种双足机器人的导航控制,尤其是在复杂、拥挤或狭窄的环境中。例如,可用于家庭服务机器人、物流配送机器人、搜救机器人等,提高其在复杂环境中的自主导航能力和安全性。该方法还可推广到其他具有非线性动力学特性的机器人系统,具有广泛的应用前景。
📄 摘要(原文)
Nonlinearity in dynamics has long been a major challenge in robotics, often causing significant performance degradation in existing control algorithms. For example, the navigation of bipedal robots can exhibit nonlinear behaviors even under simple velocity commands, as their actual dynamics are governed by complex whole-body movements and discrete contacts. In this work, we propose a novel safe navigation framework inspired by Koopman operator theory. We first train a low-level locomotion policy using deep reinforcement learning, and then capture its low-frequency, base-level dynamics by learning linearized dynamics in a high-dimensional lifted space using Dynamic Mode Decomposition. Then, our model-predictive controller (MPC) efficiently optimizes control signals via standard quadratic objective and the linear dynamics constraint in the lifted space. We demonstrate that the Koopman-based model more accurately predicts bipedal robot trajectories than baseline approaches. Furthermore, we show that the proposed navigation framework achieves improved safety with better success rates in dense environments with narrow passages.