MEVIUS: A Quadruped Robot Easily Constructed through E-Commerce with Sheet Metal Welding and Machining
作者: Kento Kawaharazuka, Shintaro Inoue, Temma Suzuki, Sota Yuzaki, Shogo Sawaguchi, Kei Okada, Masayuki Inaba
分类: cs.RO
发布日期: 2024-09-23
备注: Accepted at Humanoids2024, website - https://haraduka.github.io/mevius-hardware/
DOI: 10.1109/Humanoids58906.2024.10769853
🔗 代码/项目: GITHUB
💡 一句话要点
MEVIUS:一种易于通过电商构建的金属焊接加工四足机器人
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 四足机器人 金属加工 钣金焊接 强化学习 Sim2Real 机器人平台 户外机器人
📋 核心要点
- 现有四足机器人多为小型3D打印塑料结构,难以适应复杂地形和剧烈运动,维护困难。
- MEVIUS采用金属加工、钣金焊接和现成组件,简化结构,降低维护难度,提升耐用性。
- 通过强化学习和Sim2Real技术,MEVIUS能够在崎岖地形中稳定运动,并适应外部实验环境。
📝 摘要(中文)
为了扩展研究范围,研究者自行构建的四足机器人至关重要,因为它们具有高度的可扩展性和可定制性。这些机器人必须易于通过电子商务或DIY方法订购和组装,具有较少的组件以便于维护,并且具有足够的耐用性以承受各种环境中的实验。目前已经开发了各种四足机器人,但大多数可以由研究机构构建的机器人相对较小,并且使用3D打印的塑料制成。这些机器人无法承受山路或碎石等外部环境中的实验,并且在剧烈运动中容易损坏。虽然自己打印零件具有优势,但大量的组件使得更换损坏的零件和维护非常麻烦。因此,在本研究中,我们开发了一种金属四足机器人MEVIUS,它可以使用仅通过电子商务订购的材料进行构建和组装。我们考虑了四足机器人所需的最小组件集,仅采用金属加工、钣金焊接和现成组件。此外,我们还实现了简单的电路和软件配置。考虑到由于其简单配置而产生的通信延迟,我们通过实验证明,利用强化学习和Sim2Real,MEVIUS可以穿越各种崎岖地形并承受外部实验。所有硬件和软件组件均可从https://github.com/haraduka/mevius获得。
🔬 方法详解
问题定义:现有研究机构自建的四足机器人通常采用3D打印塑料部件,结构强度不足,难以适应户外复杂地形,且部件数量多,维护成本高。因此,需要一种易于构建、坚固耐用、易于维护的四足机器人平台,以支持更广泛的机器人研究。
核心思路:MEVIUS的核心思路是采用金属加工和钣金焊接技术,结合现成的电子元件,构建一个结构简单、坚固耐用的四足机器人。通过减少部件数量,降低维护难度,同时利用强化学习和Sim2Real技术,弥补简化结构可能带来的控制精度损失。
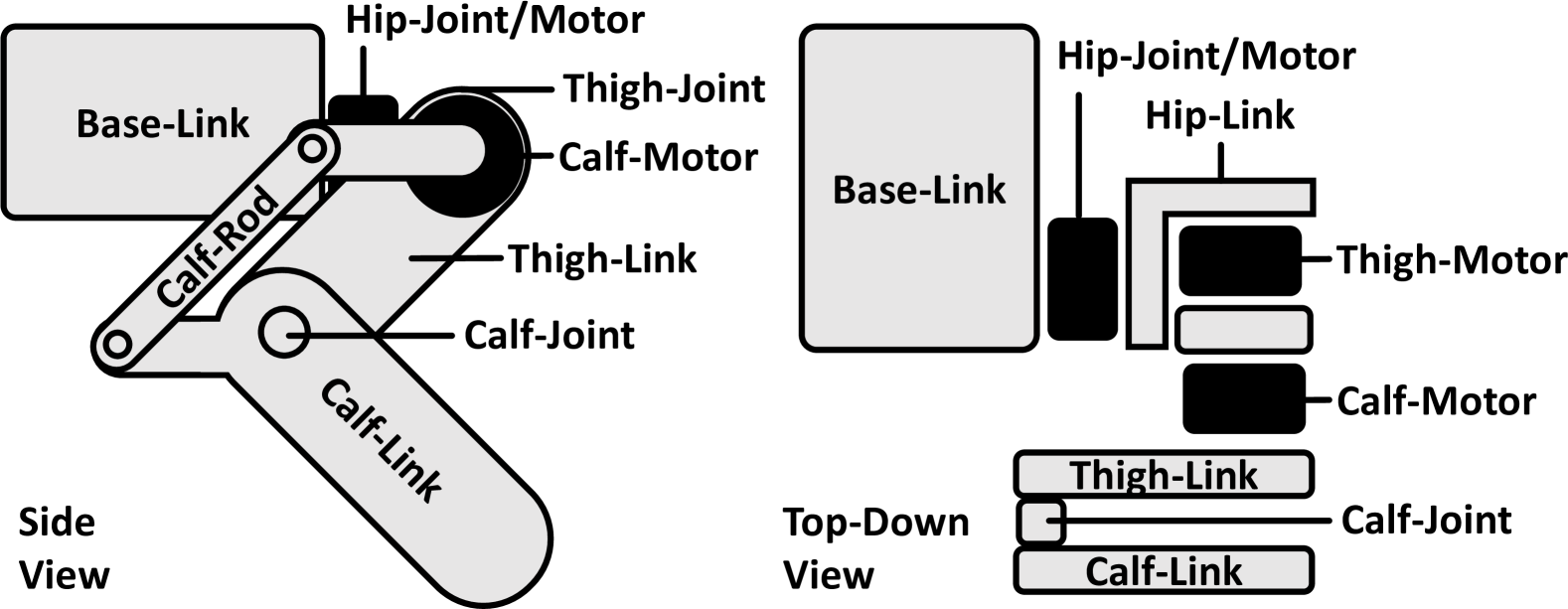
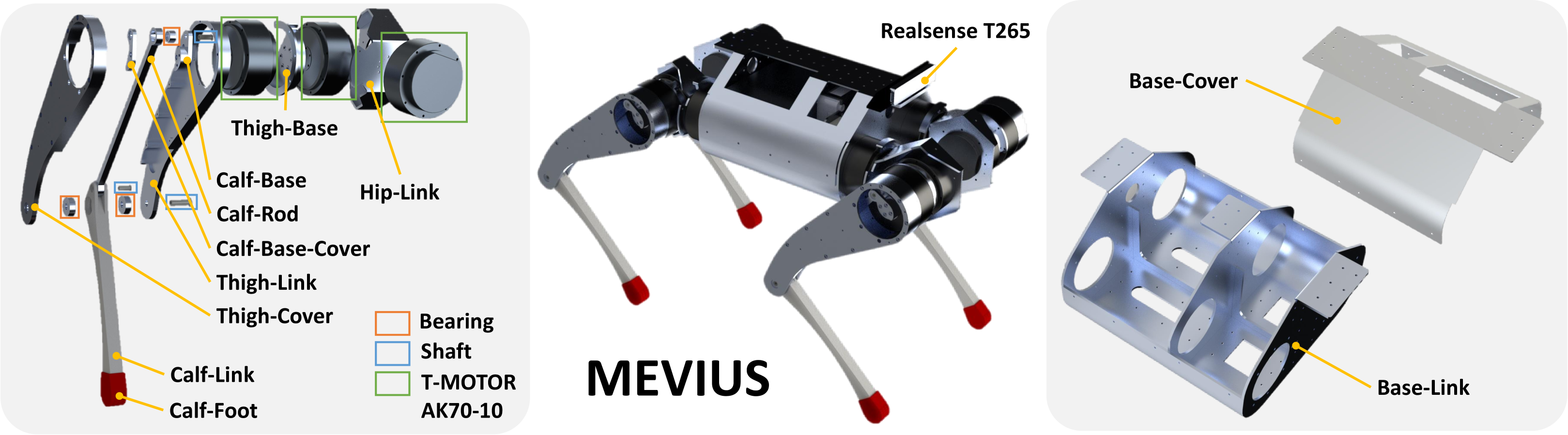
技术框架:MEVIUS的整体架构包括以下几个主要部分: 1. 机械结构:采用金属加工和钣金焊接技术制造的机身和腿部结构。 2. 驱动系统:使用现成的电机和减速器,提供关节运动所需的动力。 3. 控制系统:采用简单的电路和软件配置,实现对电机的控制。 4. 感知系统:配备必要的传感器,如IMU,用于获取机器人的姿态信息。 5. 强化学习模块:用于训练机器人在复杂地形中运动的策略,并通过Sim2Real技术将策略迁移到真实机器人上。
关键创新:MEVIUS的关键创新在于其易于构建性和耐用性。通过采用金属加工和钣金焊接技术,以及尽可能使用现成组件,降低了构建难度和成本。同时,金属结构也提高了机器人的耐用性,使其能够适应更复杂的环境。
关键设计:MEVIUS的关键设计包括: 1. 最小化组件数量:通过优化机械结构设计,减少了部件数量,降低了维护难度。 2. 金属材料选择:选择合适的金属材料,保证机器人的强度和刚度。 3. 焊接工艺:采用合适的焊接工艺,保证焊接质量和结构强度。 4. 强化学习算法:选择合适的强化学习算法,训练机器人在复杂地形中运动的策略。 5. Sim2Real技术:采用Sim2Real技术,将仿真环境中训练的策略迁移到真实机器人上,提高机器人的适应性。
🖼️ 关键图片

📊 实验亮点
MEVIUS通过实验验证了其在复杂地形中的运动能力。利用强化学习和Sim2Real技术,MEVIUS能够在崎岖地形中稳定行走,并成功地将仿真环境中训练的策略迁移到真实机器人上。实验结果表明,MEVIUS具有良好的适应性和鲁棒性,能够满足户外实验的需求。
🎯 应用场景
MEVIUS四足机器人可应用于搜救、勘探、巡检等领域。其坚固耐用的特性使其能够在恶劣环境中工作,例如地震灾区、矿山、化工厂等。同时,其易于构建和维护的特点也使其成为机器人研究的理想平台,可用于开发各种新型机器人算法和应用。
📄 摘要(原文)
Quadruped robots that individual researchers can build by themselves are crucial for expanding the scope of research due to their high scalability and customizability. These robots must be easily ordered and assembled through e-commerce or DIY methods, have a low number of components for easy maintenance, and possess durability to withstand experiments in diverse environments. Various quadruped robots have been developed so far, but most robots that can be built by research institutions are relatively small and made of plastic using 3D printers. These robots cannot withstand experiments in external environments such as mountain trails or rubble, and they will easily break with intense movements. Although there is the advantage of being able to print parts by yourself, the large number of components makes replacing broken parts and maintenance very cumbersome. Therefore, in this study, we develop a metal quadruped robot MEVIUS, that can be constructed and assembled using only materials ordered through e-commerce. We have considered the minimum set of components required for a quadruped robot, employing metal machining, sheet metal welding, and off-the-shelf components only. Also, we have achieved a simple circuit and software configuration. Considering the communication delay due to its simple configuration, we experimentally demonstrate that MEVIUS, utilizing reinforcement learning and Sim2Real, can traverse diverse rough terrains and withstand outside experiments. All hardware and software components can be obtained from https://github.com/haraduka/mevius.