InteLiPlan: An Interactive Lightweight LLM-Based Planner for Domestic Robot Autonomy
作者: Kim Tien Ly, Kai Lu, Ioannis Havoutis
分类: cs.RO
发布日期: 2024-09-22 (更新: 2025-09-05)
💡 一句话要点
InteLiPlan:用于家庭机器人的交互式轻量级LLM规划器
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 家庭机器人 自主规划 人机交互 LLM 故障恢复
📋 核心要点
- 现有机器人自主规划方法依赖大规模数据或难以适应动态环境,限制了其在家庭场景中的应用。
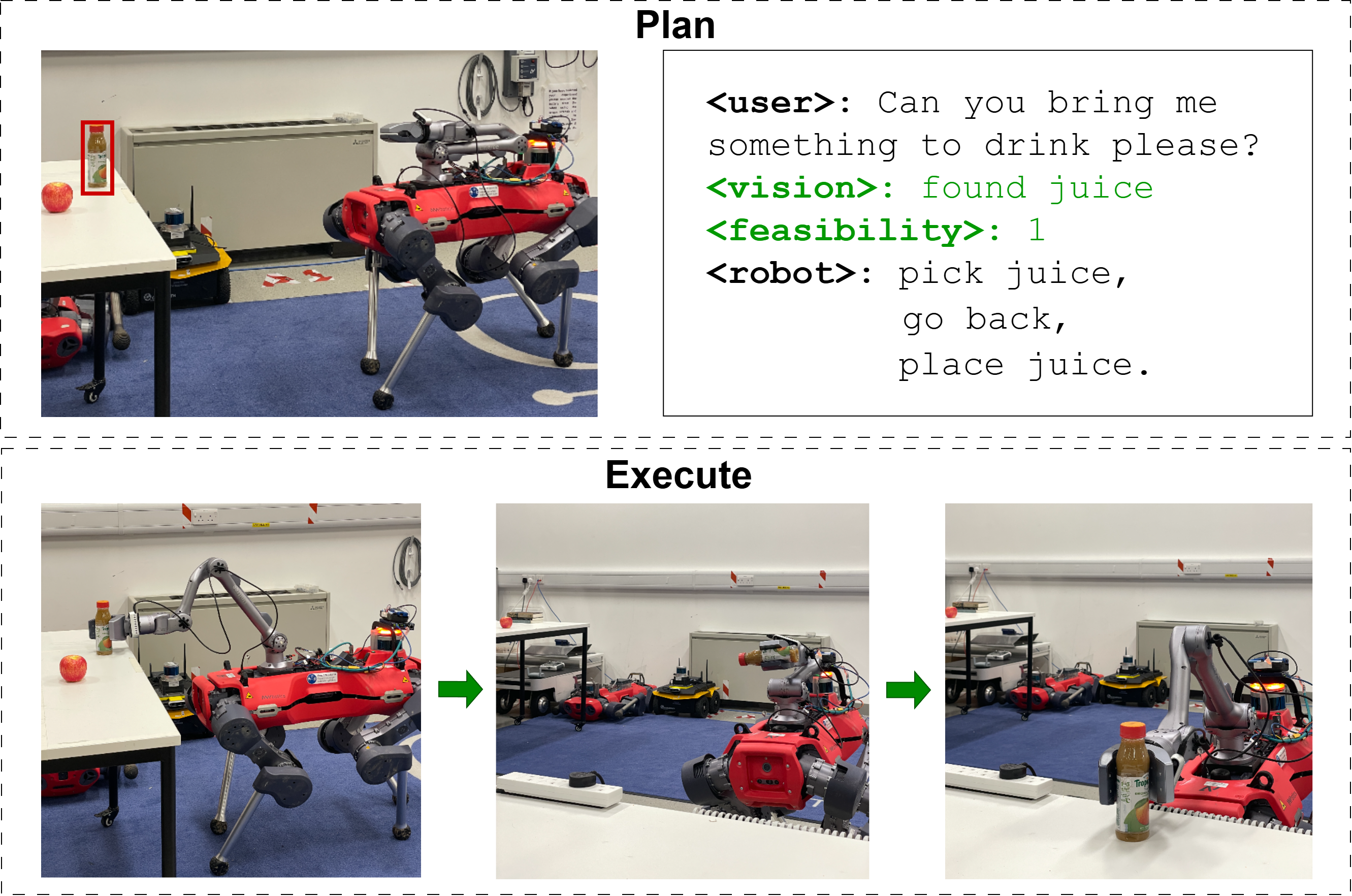
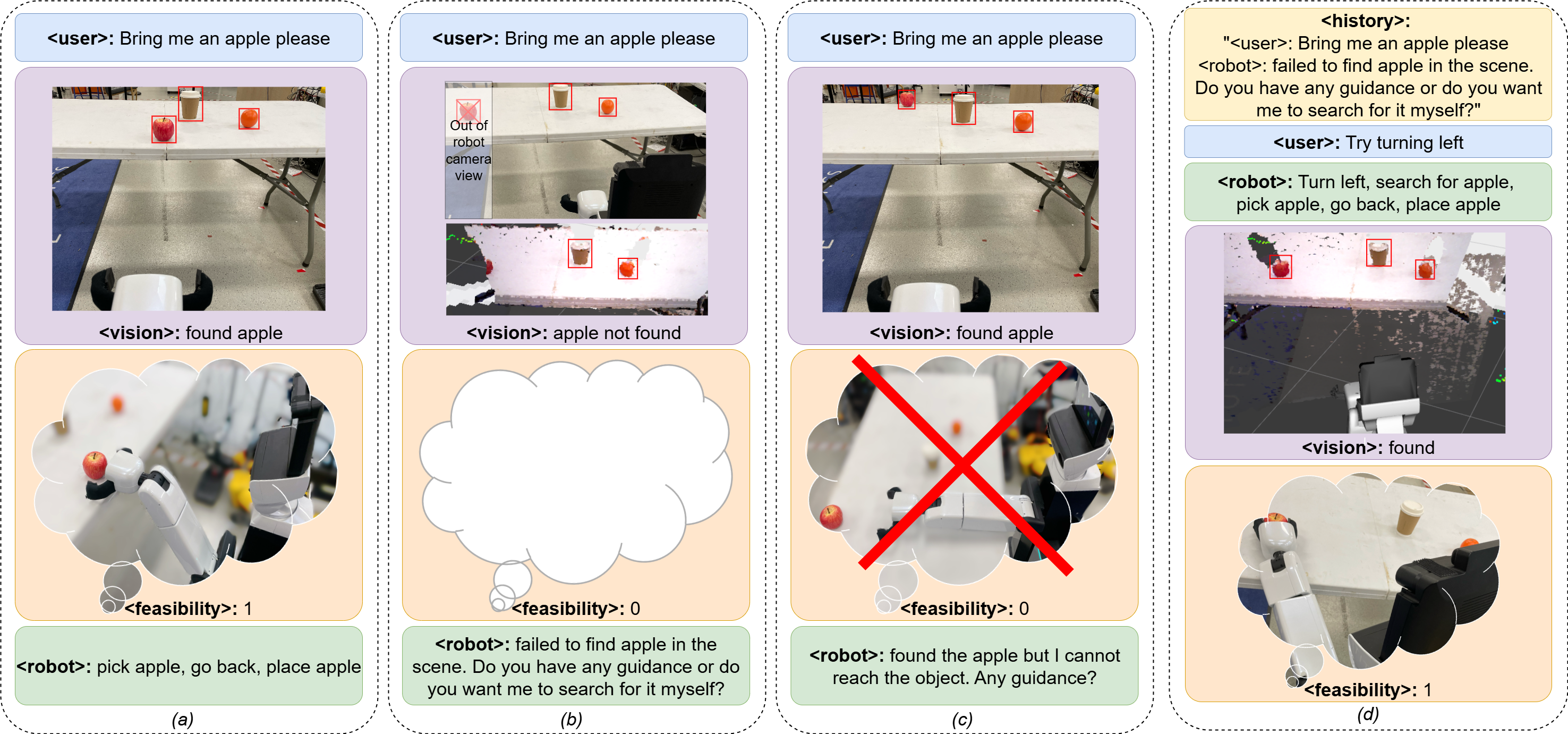
- InteLiPlan通过轻量级LLM和人机交互机制,实现了机器人任务规划、故障恢复和实时适应能力。
- 实验表明,InteLiPlan在真实机器人平台上实现了95%的任务成功率,性能与大型LLM规划器相当,但计算成本更低。
📝 摘要(中文)
本文介绍了一种基于交互式LLM的框架,旨在增强家庭机器人的自主性和鲁棒性,从而实现具身智能。该方法减少了对大规模数据的依赖,并包含一个机器人无关的流水线,该流水线体现了LLM。我们的框架InteLiPlan确保LLM的决策能力与机器人功能有效对齐,从而增强操作的鲁棒性和适应性,同时我们的人在环机制允许在需要用户指令时进行实时人工干预。我们在仿真和真实的丰田人形辅助机器人以及Anymal D-Unitree Z1平台上评估了我们的方法。我们的方法在“取我”任务完成中实现了95%的成功率,并具有故障恢复能力,突出了其在故障推理和任务规划方面的能力。InteLiPlan实现了与最先进的大规模基于LLM的机器人规划器相当的性能,同时仅使用实时板载计算。
🔬 方法详解
问题定义:论文旨在解决家庭服务机器人自主规划和故障恢复的问题。现有方法通常依赖于大规模数据集进行训练,计算成本高昂,且泛化能力有限,难以适应家庭环境中的各种突发情况。此外,缺乏有效的人机交互机制,使得机器人难以在遇到未知情况时寻求人类帮助。
核心思路:论文的核心思路是利用轻量级LLM作为任务规划器,并结合人机交互机制,使机器人能够在实时环境中进行推理、规划和故障恢复。通过人机协作,机器人可以有效地利用人类的知识和经验,提高任务完成的成功率和鲁棒性。
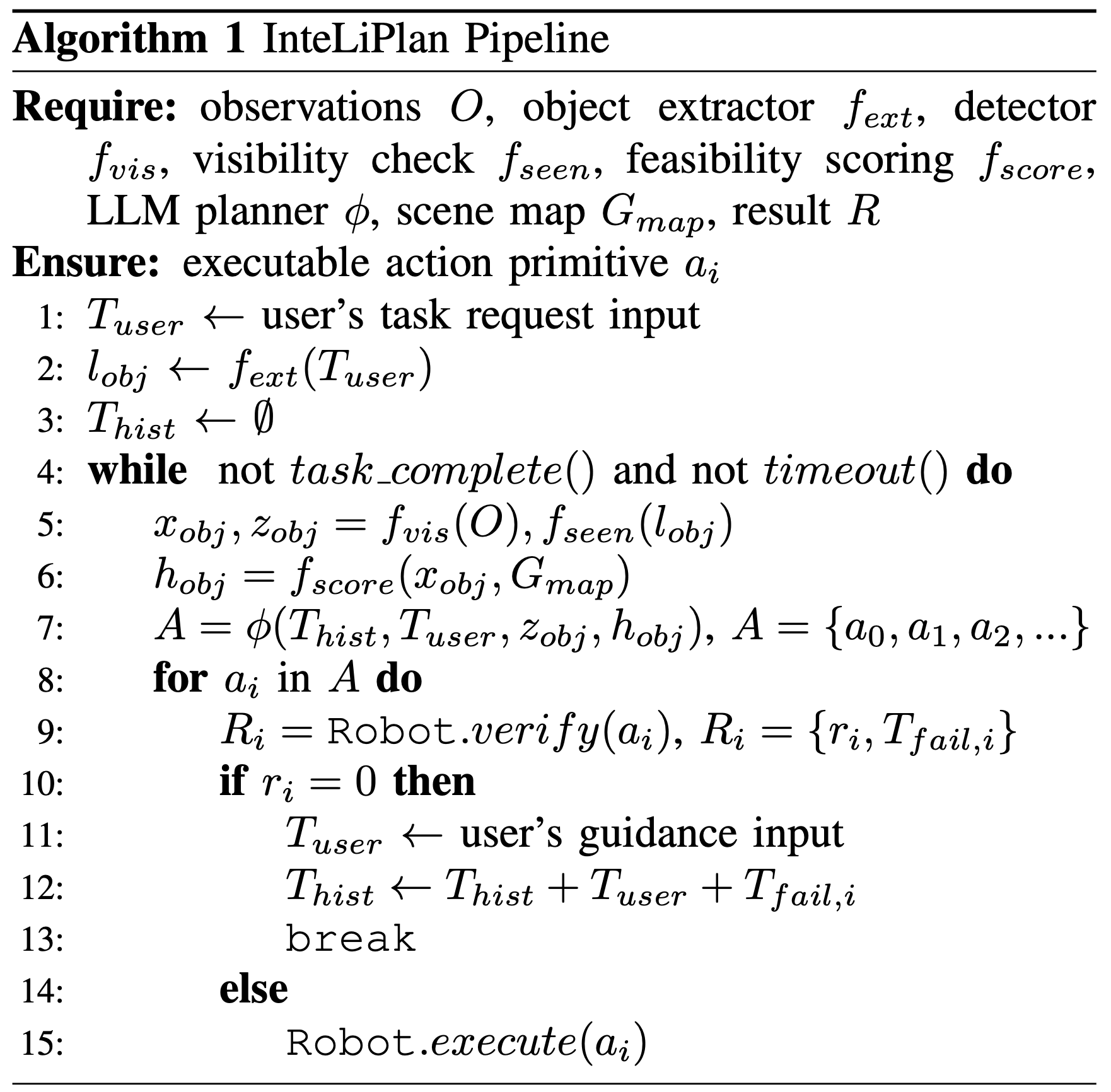
技术框架:InteLiPlan框架包含以下主要模块:1) LLM任务规划器:负责根据用户指令和环境信息生成任务执行计划。2) 机器人控制模块:负责将任务计划转化为具体的机器人动作。3) 故障检测与恢复模块:负责检测任务执行过程中的故障,并根据LLM的推理结果生成恢复计划。4) 人机交互模块:允许用户实时监控机器人状态,并在必要时提供指令或纠正错误。
关键创新:该方法最重要的创新点在于将轻量级LLM与人机交互机制相结合,实现了机器人自主规划和故障恢复。与传统方法相比,该方法无需大规模数据集进行训练,计算成本更低,且具有更强的泛化能力和适应性。此外,人机交互机制使得机器人能够有效地利用人类的知识和经验,提高任务完成的成功率和鲁棒性。
关键设计:LLM采用较小的参数规模,以保证实时性。人机交互模块设计了简洁直观的界面,方便用户进行操作。故障检测模块基于传感器数据和LLM的推理结果,实现快速准确的故障诊断。恢复计划生成模块利用LLM的推理能力,生成合理的恢复策略。
🖼️ 关键图片
📊 实验亮点
InteLiPlan在“取我”任务中取得了95%的成功率,并具备故障恢复能力。实验结果表明,该方法在性能上与最先进的大规模LLM机器人规划器相当,但仅使用实时板载计算,显著降低了计算成本,使其更适用于资源受限的机器人平台。
🎯 应用场景
该研究成果可应用于家庭服务机器人、医疗辅助机器人等领域,帮助机器人更好地理解人类指令、自主完成任务,并能在复杂环境中进行故障恢复。通过人机协作,可以显著提升机器人的智能化水平和服务能力,为人们的生活带来便利。
📄 摘要(原文)
We introduce an interactive LLM-based framework designed to enhance the autonomy and robustness of domestic robots, targeting embodied intelligence. Our approach reduces reliance on large-scale data and incorporates a robot-agnostic pipeline that embodies an LLM. Our framework, InteLiPlan, ensures that the LLM's decision-making capabilities are effectively aligned with robotic functions, enhancing operational robustness and adaptability, while our human-in-the-loop mechanism allows for real-time human intervention when user instruction is required. We evaluate our method in both simulation and on the real Toyota Human Support Robot and Anymal D-Unitree Z1 platforms. Our method achieves a 95% success rate in the 'fetch me' task completion with failure recovery, highlighting its capability in both failure reasoning and task planning. InteLiPlan achieves comparable performance to state-of-the-art large-scale LLM-based robotics planners, while using only real-time onboard computing.