Mixed Reality Tele-Ultrasound over 750 km: A Feasibility Study
作者: Ryan Yeung, David Black, Patrick B. Chen, Victoria Lessoway, Janice Reid, Sergio Rangel-Suarez, Silvia D. Chang, Septimiu E. Salcudean
分类: cs.HC, cs.RO
发布日期: 2024-09-19 (更新: 2025-06-10)
备注: 8 pages, 11 figures
💡 一句话要点
混合现实远程超声:750公里距离下的可行性研究
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 远程超声 混合现实 人体遥操作 触觉反馈 远程医疗
📋 核心要点
- 偏远地区超声资源匮乏,现有远程超声系统在触觉反馈和操作精度上存在挑战。
- 提出一种基于混合现实的人体遥操作远程超声系统,专家远程指导新手进行操作。
- 实验结果表明,该系统在750公里距离下,能实现高质量的远程腹部超声成像,可用性高。
📝 摘要(中文)
为了解决偏远地区超声检查资源匮乏的问题,本文在前期工作的基础上,进一步发展了一种基于混合现实和触觉反馈的远程超声系统,称为“人体遥操作”。该系统允许新手扮演认知机器人的角色,由专家通过混合现实远程控制。本文总结了该系统的最新进展,并描述了一项评估其在长距离远程腹部超声检查中应用可行性的研究。为了提供简单而有效的触觉反馈,我们使用了一个患者的椭球模型,其参数通过系统的位置和力传感器进行校准。我们在加拿大海达瓜伊的斯基德盖特测试了该系统,专家位于754公里外的加拿大温哥华。我们总共进行了11次扫描,包括10名新手和2名超声医师。超声医师的任务是在上腹部区域获取5张目标图像。图像质量由2名放射科医生评估。我们收集了对齐数据,并让新手完成了任务负荷和可用性问卷。新手和超声医师都提供了书面和口头反馈,以供未来的设计迭代参考。92%的采集图像具有足够的质量,可以被两位放射科医生解读。新手报告的平均任务负荷低于文献中报告的参考值,可用性评价一致为积极。图像质量与跟随者与虚拟换能器的对齐误差之间未发现相关性。总的来说,我们表明,即使在很远的距离和新手跟随者的情况下,人体遥操作也能使超声医师进行高性能的远程腹部超声成像。未来的工作将把人体遥操作与传统的、机器人的和远程指导的超声进行比较。
🔬 方法详解
问题定义:论文旨在解决偏远地区超声诊断资源不足的问题。现有远程超声系统,尤其是机器人辅助的系统,成本高昂且操作复杂,难以在资源有限的地区推广。此外,缺乏有效的触觉反馈和直观的操作界面,也限制了远程超声的诊断质量和效率。
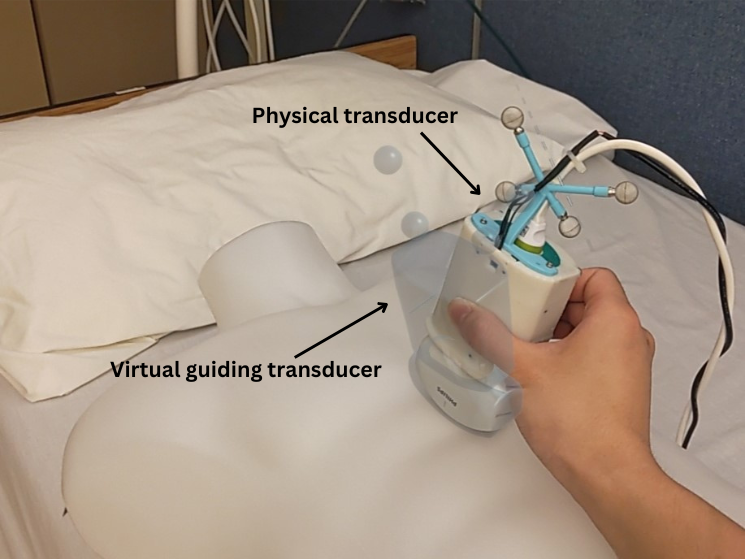
核心思路:论文的核心思路是利用“人体遥操作”的概念,即由专家远程指导新手进行超声扫描。专家通过混合现实界面观察患者的虚拟模型,并向新手提供操作指导。新手则在专家的指导下,手持超声探头进行实际扫描。这种方法结合了专家的经验和新手的执行力,降低了对复杂机器人系统的依赖,并提供了更直观的操作体验。
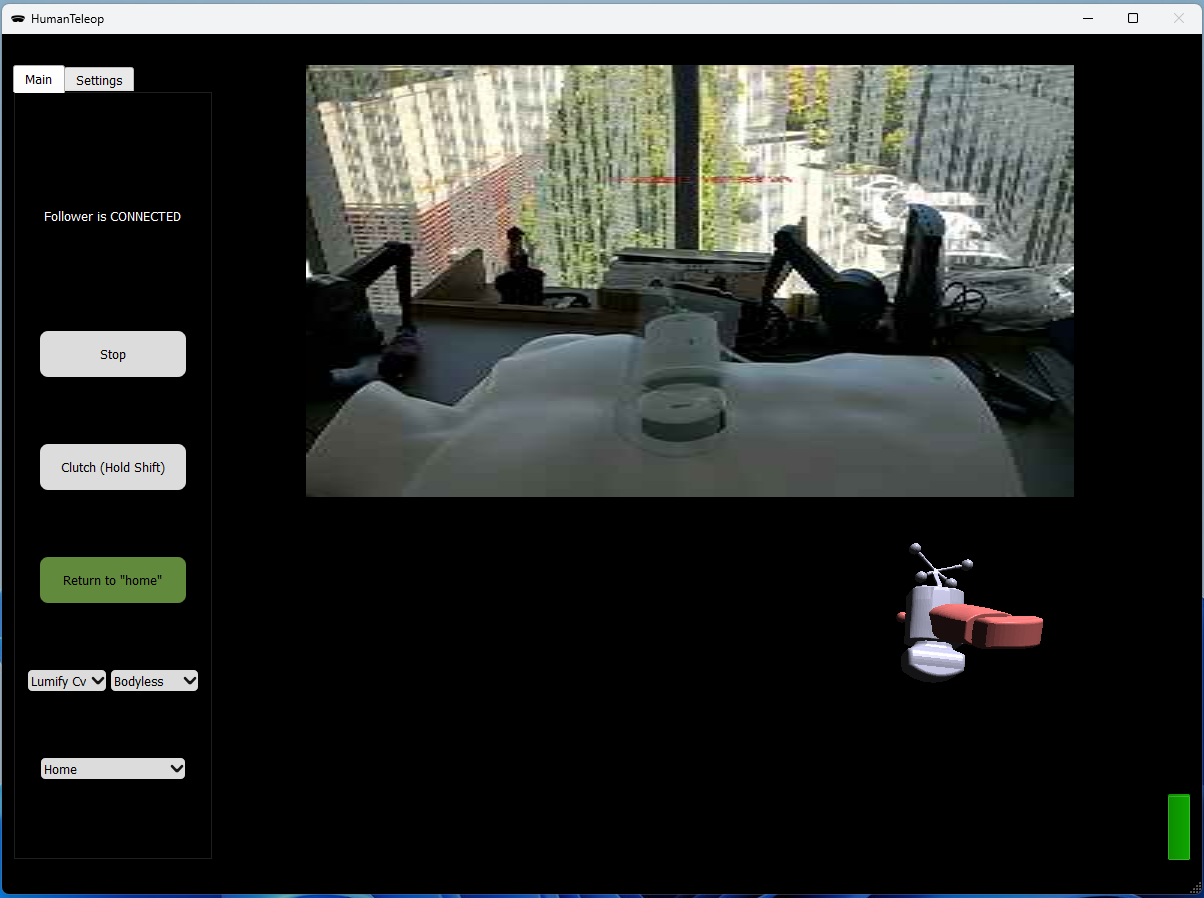
技术框架:该系统的整体架构包括以下几个主要模块:1) 远程专家端:专家通过混合现实设备观察患者的虚拟模型,并向新手提供操作指导;2) 远程新手端:新手在专家的指导下,手持超声探头进行实际扫描;3) 数据传输模块:负责将超声图像、位置数据和力反馈数据从新手端传输到专家端,以及将专家的指令从专家端传输到新手端;4) 触觉反馈模块:利用患者的椭球模型,根据位置和力传感器的数据,向专家提供简单的触觉反馈。
关键创新:该论文的关键创新在于将混合现实和人体遥操作相结合,实现了一种低成本、易于操作的远程超声系统。与传统的机器人辅助远程超声系统相比,该系统无需复杂的机器人控制算法,降低了系统的复杂性和成本。此外,通过混合现实界面,专家可以更直观地观察患者的虚拟模型,并向新手提供更有效的操作指导。
关键设计:为了提供有效的触觉反馈,论文采用了一个患者的椭球模型。该模型的参数通过系统的位置和力传感器进行校准,以反映患者的实际体型。此外,论文还设计了一套用户友好的混合现实界面,方便专家进行远程指导。在实验中,专家需要指导新手获取5张上腹部区域的目标图像,并由放射科医生评估图像质量。
🖼️ 关键图片

📊 实验亮点
实验结果表明,在754公里的距离下,92%的采集图像具有足够的质量,可以被放射科医生解读。新手报告的平均任务负荷低于文献参考值,可用性评价一致为积极。该研究证明了人体遥操作在远程超声成像中的可行性和有效性。
🎯 应用场景
该研究成果可应用于偏远地区、灾区或军事医疗等场景,解决超声诊断资源不足的问题。通过远程指导,专家可以为缺乏经验的医护人员提供支持,提高诊断效率和准确性。未来,该技术有望与人工智能相结合,实现更智能化的远程超声诊断。
📄 摘要(原文)
To address the lack of access to ultrasound in remote communities, previous work introduced human teleoperation, a mixed reality and haptics-based tele-ultrasound system. In this approach, a novice takes the role of a cognitive robot controlled remotely by an expert through mixed reality. In this manuscript we summarize new developments to this system and describe a feasibility study assessing its use for long-distance remote abdominal ultrasound examinations. To provide simple but effective haptic feedback, we used an ellipsoid model of the patient with its parameters calibrated using our system's position and force sensors. We tested the system in Skidegate, Haida Gwaii, Canada, with the experts positioned 754 km away in Vancouver, Canada. We performed 11 total scans with 10 novices and 2 sonographers. The sonographers were tasked with acquiring 5 target images in the epigastric region. The image acquisition quality was assessed by 2 radiologists. We collected alignment data and the novices completed task load and usability questionnaires. Both the novices and sonographers provided written and verbal feedback to inform future design iterations. 92% of the acquired images had sufficient quality for interpretation by both radiologists. The mean task load reported by the novices was below reference values reported in literature and the usability was unanimously positive. No correlation was found between image quality and the follower's alignment error with the virtual transducer. Overall, we show that human teleoperation enables sonographers to perform remote abdominal ultrasound imaging with high performance, even across large distances and with novice followers. Future work will compare human teleoperation to conventional, robotic and tele-mentored ultrasound.