Adaptive Trajectory Optimization for Task-Specific Human-Robot Collaboration
作者: Hamed Rahimi Nohooji, Holger Voos
分类: cs.RO
发布日期: 2024-09-19 (更新: 2025-03-18)
备注: 7 pages, 6 figures, 1 table
💡 一句话要点
提出一种任务自适应轨迹优化框架,用于人机协作中的动态运动规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机协作 轨迹优化 自适应控制 逆微分Riccati方程 神经PID控制
📋 核心要点
- 传统人机协作依赖预定义轨迹,难以适应任务变化和人类动态输入,限制了协作的灵活性。
- 该方法提出基于逆微分Riccati方程的动态轨迹优化,并结合神经自适应PID控制,实现对任务和人类交互的实时适应。
- 数值模拟验证了该方法的有效性,能够在保证稳定性和精度的前提下,实现自适应的人机协作运动规划。
📝 摘要(中文)
本文提出了一种针对人机协作的任务特定轨迹优化框架,该框架能够基于人类交互动力学实现自适应运动规划。与依赖预定义期望轨迹的传统方法不同,该框架利用逆微分Riccati方程动态地优化协作运动,从而确保对任务变化和人类输入的适应性。生成的轨迹作为神经自适应PID控制器的参考,该控制器利用神经网络实时调整控制增益,在保持低计算复杂度的同时解决系统不确定性。轨迹规划和自适应控制律的结合确保了稳定和精确的关节空间跟踪,而无需进行广泛的参数调整。数值模拟验证了所提出的方法。
🔬 方法详解
问题定义:论文旨在解决人机协作中,机器人轨迹规划如何适应人类行为变化和任务不确定性的问题。现有方法通常依赖于预定义的轨迹,缺乏灵活性,难以应对动态变化的人机交互场景。这些方法需要大量参数调整,且难以保证在各种任务下的稳定性和精度。
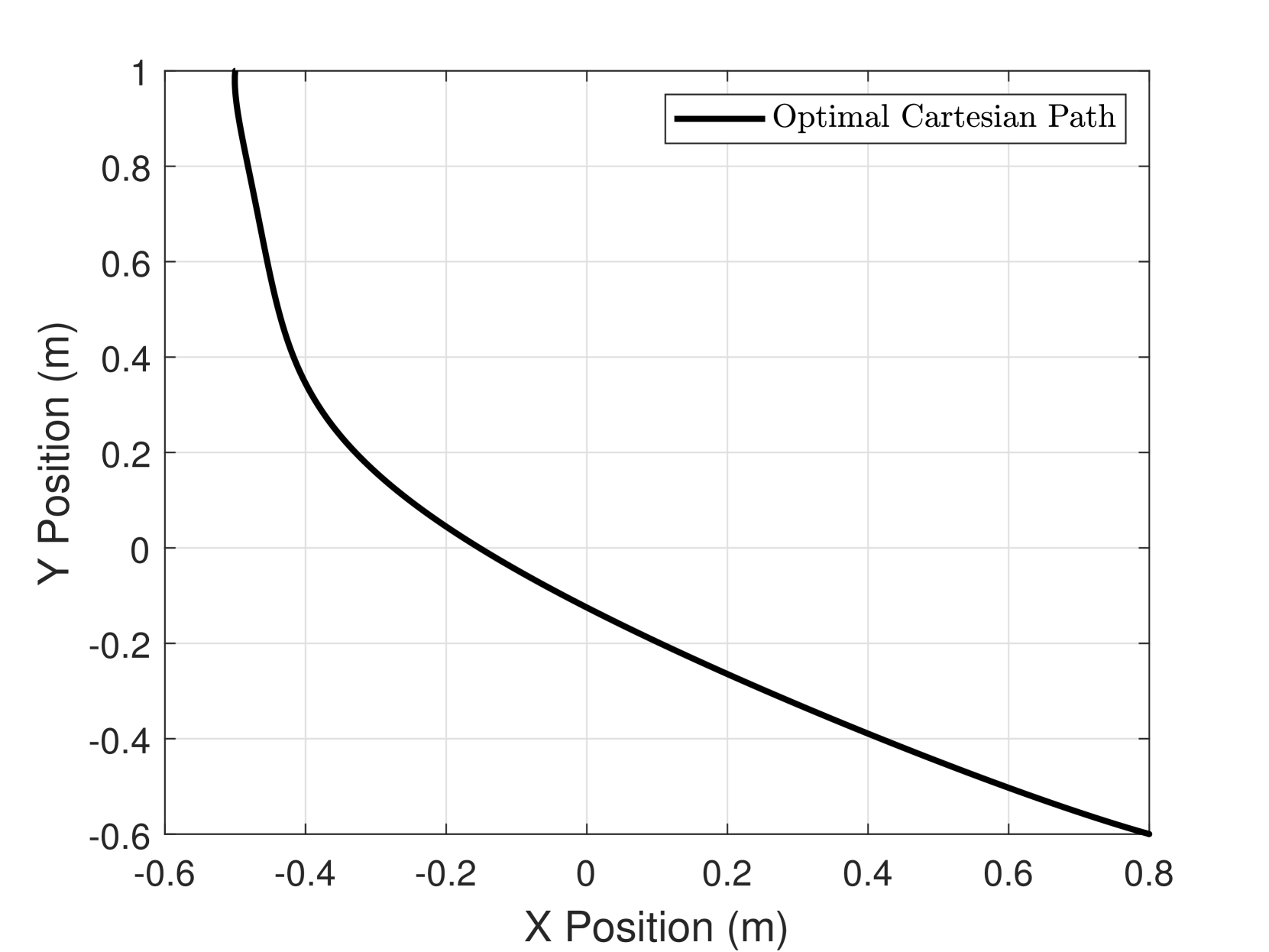
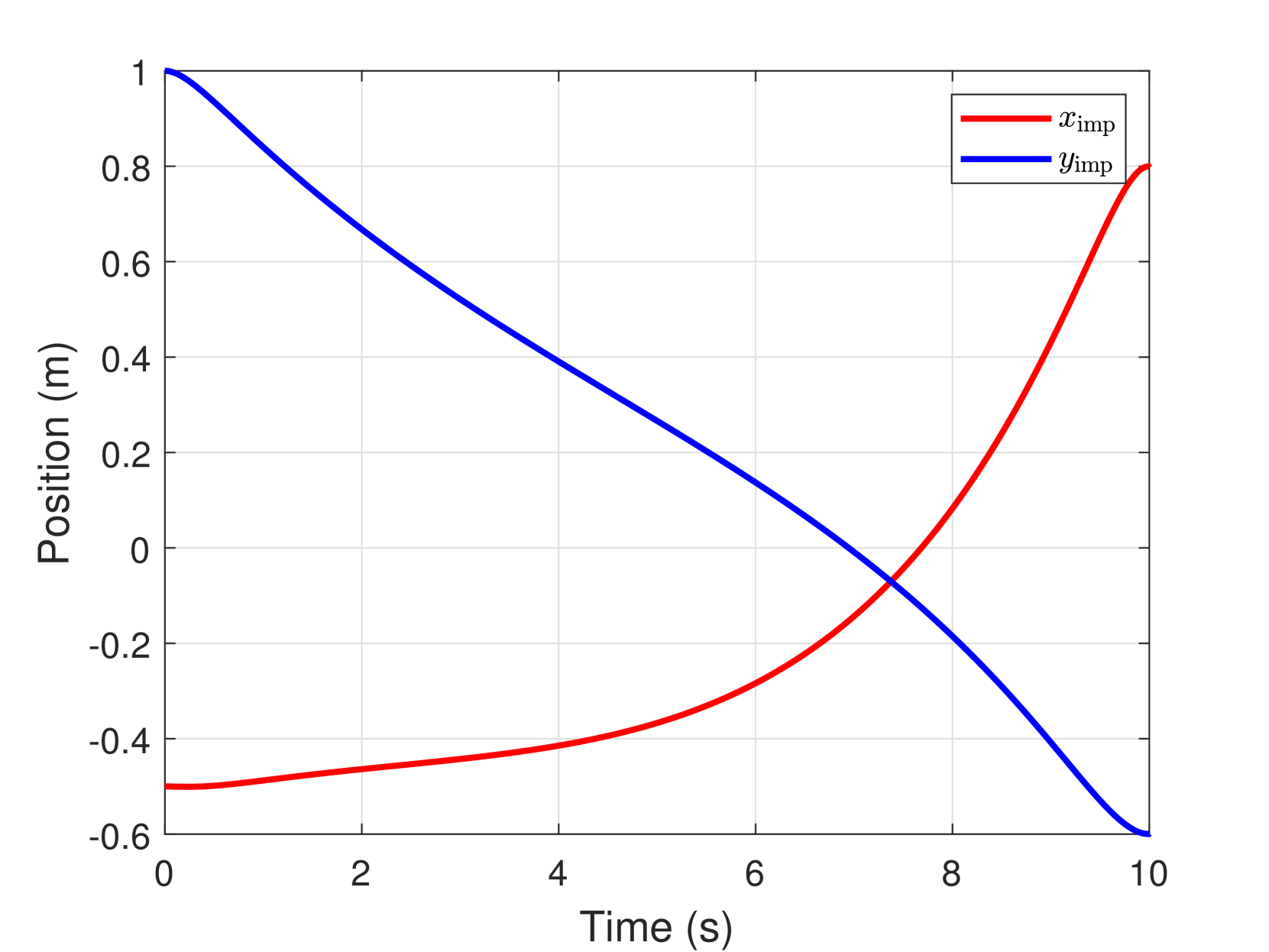
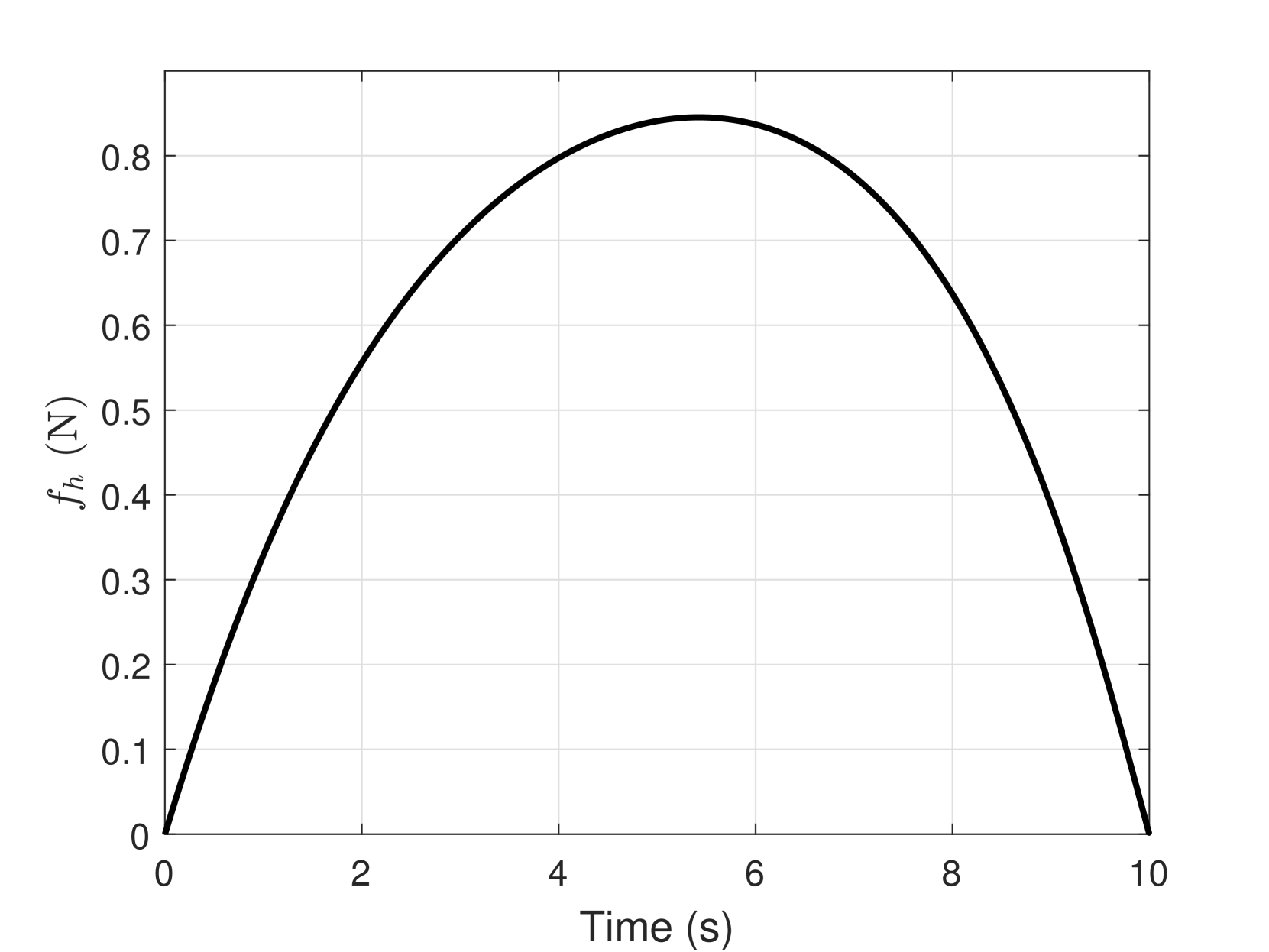
核心思路:论文的核心思路是利用逆微分Riccati方程动态优化机器人轨迹,使其能够实时适应人类的动作和任务的变化。同时,采用神经自适应PID控制器,通过神经网络实时调整控制增益,以应对系统的不确定性,从而实现稳定和精确的关节空间跟踪。
技术框架:该框架包含两个主要模块:轨迹优化模块和神经自适应控制模块。首先,轨迹优化模块利用逆微分Riccati方程,根据当前的任务状态和人类输入,动态生成参考轨迹。然后,神经自适应PID控制器以生成的轨迹为参考,通过神经网络实时调整PID控制器的增益,从而实现对机器人运动的精确控制。整个框架旨在实现对人机协作任务的自适应和鲁棒控制。
关键创新:该论文的关键创新在于将逆微分Riccati方程应用于人机协作的动态轨迹优化,并结合神经自适应PID控制,实现了对任务变化和人类输入的实时适应。与传统的基于预定义轨迹的方法相比,该方法能够更好地应对动态变化的人机交互场景,并具有更强的鲁棒性和适应性。
关键设计:轨迹优化模块的关键在于逆微分Riccati方程的求解,需要合理设置初始条件和边界条件,以保证轨迹的平滑性和可行性。神经自适应PID控制器的关键在于神经网络的设计,需要选择合适的网络结构和训练算法,以保证控制器的稳定性和精度。此外,还需要设计合适的奖励函数,以引导神经网络学习到最优的控制策略。
🖼️ 关键图片
📊 实验亮点
论文通过数值模拟验证了所提出方法的有效性。结果表明,该方法能够在保证稳定性和精度的前提下,实现对人机协作任务的自适应控制。与传统的基于预定义轨迹的方法相比,该方法能够更好地应对动态变化的人机交互场景,并具有更强的鲁棒性和适应性。具体的性能数据(例如:轨迹跟踪误差、控制精度等)未知,但整体效果优于传统方法。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如:工业装配、医疗康复、家庭服务等。通过自适应的轨迹规划和控制,机器人能够更好地与人类协同工作,提高工作效率和安全性。未来,该技术有望应用于更复杂的协作任务,例如:手术机器人、救援机器人等,实现更智能、更安全的人机协作。
📄 摘要(原文)
This paper proposes a task-specific trajectory optimization framework for human-robot collaboration, enabling adaptive motion planning based on human interaction dynamics. Unlike conventional approaches that rely on predefined desired trajectories, the proposed framework optimizes the collaborative motion dynamically using the inverse differential Riccati equation, ensuring adaptability to task variations and human input. The generated trajectory serves as the reference for a neuro-adaptive PID controller, which leverages a neural network to adjust control gains in real time, addressing system uncertainties while maintaining low computational complexity. The combination of trajectory planning and the adaptive control law ensures stability and accurate joint-space tracking without requiring extensive parameter tuning. Numerical simulations validate the proposed approach.