MuxHand: A Cable-driven Dexterous Robotic Hand Using Time-division Multiplexing Motors
作者: Jianle Xu, Shoujie Li, Hong Luo, Houde Liu, Xueqian Wang, Wenbo Ding, Chongkun Xia
分类: cs.RO
发布日期: 2024-09-19
备注: 7 pages
💡 一句话要点
MuxHand:一种基于时分复用电机驱动的高灵巧度机器人手
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 灵巧手 机器人手 时分复用电机 磁性关节 抓取 操作 3D打印 缆绳驱动
📋 核心要点
- 现有灵巧手电机数量多,成本高昂,限制了其应用范围。
- MuxHand采用时分复用电机机制,用少量电机实现对多根缆绳的独立控制,降低成本。
- 实验表明,该手具有良好的抓取和操作性能,指尖负载能力达到1.0kg,磁性关节抗冲击。
- 磁性关节增强了手指的抗冲击性和自复位能力,提升了操作的稳定性和鲁棒性。
📝 摘要(中文)
本文提出了一种名为MuxHand的机器人手,它采用时分复用电机(TDMM)机制。该系统仅使用4个电机即可独立控制9根缆绳,显著降低了成本,同时保持了较高的灵巧度。为了增强抓取和操作任务期间的稳定性和平滑性,我们将磁性关节集成到三个3D打印的手指中。这些关节提供了卓越的抗冲击性和自复位能力。我们进行了一系列实验来评估MuxHand的抓取和操作性能。结果表明,TDMM机制可以精确控制连接到手指关节的每根缆绳,从而实现稳健的抓取和灵巧的操作。此外,指尖负载能力达到1.0 kg,磁性关节有效地吸收了冲击并纠正了不对准,且未造成损坏。
🔬 方法详解
问题定义:现有灵巧机器人手的设计通常需要大量的电机来控制各个关节的运动,这导致了系统成本高昂、体积庞大以及控制复杂。尤其是在需要高灵巧度的应用场景下,电机数量的增加会显著提升系统的复杂度和维护难度。因此,如何在保证灵巧度的前提下,降低机器人手的成本和复杂度是一个亟待解决的问题。
核心思路:MuxHand的核心思路是利用时分复用电机(TDMM)机制,通过巧妙的机械结构设计,使得少量电机可以控制多个关节的运动。具体而言,通过合理安排电机的工作时序,实现对不同缆绳的独立控制,从而模拟多个电机独立驱动的效果。这种设计在降低电机数量的同时,尽可能地保留了机器人手的灵巧度。
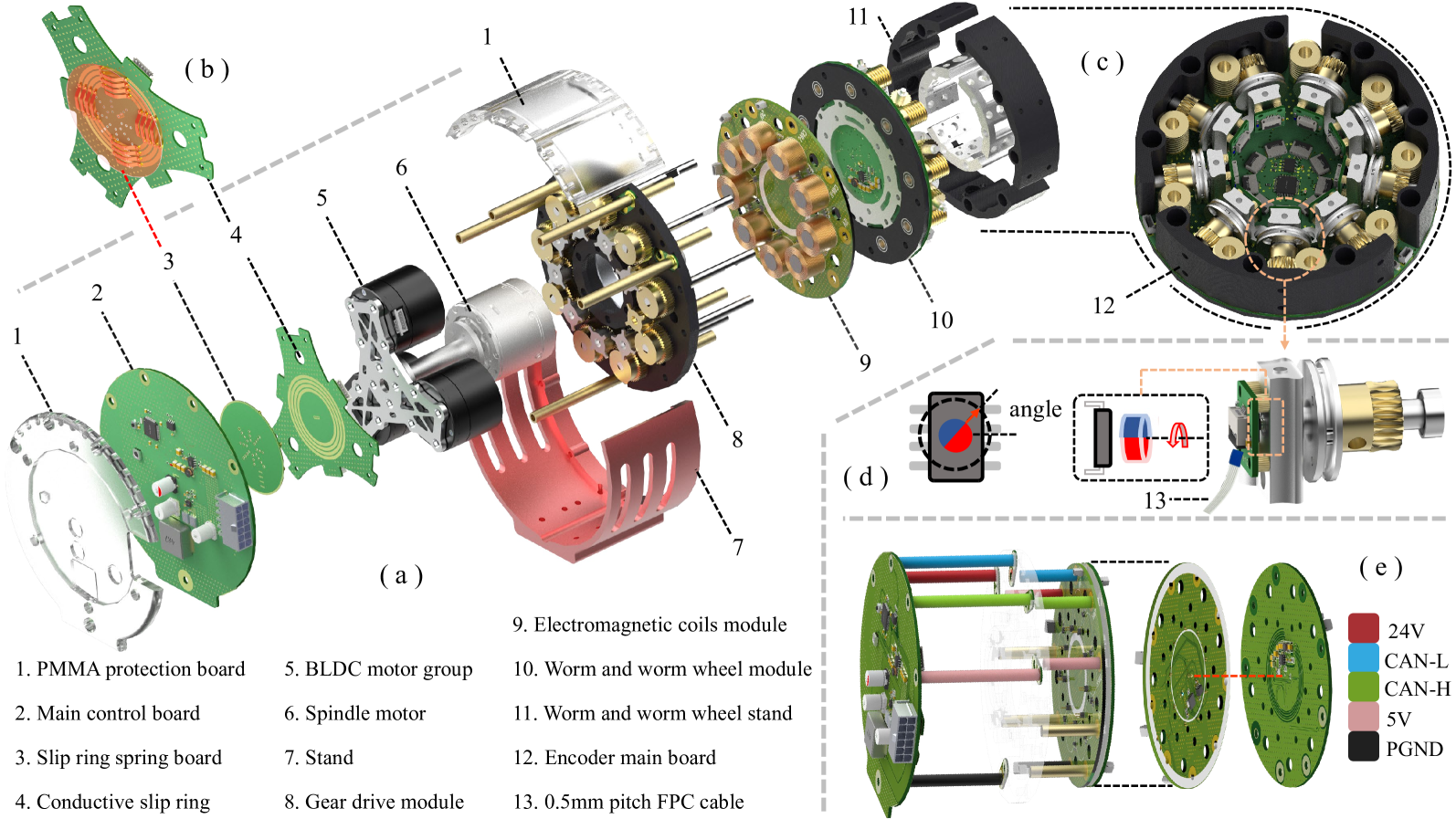
技术框架:MuxHand的整体架构包括三个主要部分:1)时分复用电机驱动机构:负责将电机的旋转运动转化为缆绳的拉动,并实现时分复用控制;2)3D打印手指:包含多个关节,通过缆绳驱动实现弯曲和伸展;3)磁性关节:集成在手指关节中,提供抗冲击性和自复位能力。整个系统通过控制算法协调各个部分的运动,实现抓取和操作任务。
关键创新:MuxHand最重要的技术创新点在于时分复用电机驱动机构的设计。传统的机器人手通常采用一个电机驱动一个关节的方式,而MuxHand通过TDMM机制,实现了用少量电机控制多个关节的目的。这种设计不仅降低了成本,还减小了系统的体积和重量。此外,磁性关节的应用也提高了机器人手的鲁棒性和可靠性。
关键设计:TDMM机制的关键在于合理安排电机的工作时序和缆绳的连接方式。论文中具体的设计细节未知,但可以推测需要精确控制电机的转动角度和速度,以及缆绳的张力,以保证每个关节都能按照预定的轨迹运动。此外,磁性关节的设计也需要考虑磁铁的强度、尺寸和安装位置,以实现最佳的抗冲击和自复位效果。具体的控制算法也需要根据TDMM机制的特点进行优化,以保证系统的稳定性和精度。
🖼️ 关键图片


📊 实验亮点
实验结果表明,MuxHand能够精确控制连接到手指关节的每根缆绳,实现稳健的抓取和灵巧的操作。指尖负载能力达到1.0 kg,证明了其具有较强的抓取能力。磁性关节有效地吸收了冲击并纠正了不对准,且未造成损坏,验证了其抗冲击性和自复位能力。这些结果表明,MuxHand在降低成本的同时,保持了较高的性能。
🎯 应用场景
MuxHand具有广泛的应用前景,例如在工业自动化领域,它可以用于执行精细的装配、检测和分拣任务。在医疗领域,它可以辅助医生进行手术操作,提高手术的精度和安全性。此外,MuxHand还可以应用于服务机器人、康复机器人等领域,为人们提供更加便捷和智能的服务。该研究有望推动灵巧机器人手技术的普及和应用。
📄 摘要(原文)
The robotic dexterous hand is responsible for both grasping and dexterous manipulation. The number of motors directly influences both the dexterity and the cost of such systems. In this paper, we present MuxHand, a robotic hand that employs a time-division multiplexing motor (TDMM) mechanism. This system allows 9 cables to be independently controlled by just 4 motors, significantly reducing cost while maintaining high dexterity. To enhance stability and smoothness during grasping and manipulation tasks, we have integrated magnetic joints into the three 3D-printed fingers. These joints offer superior impact resistance and self-resetting capabilities. We conduct a series of experiments to evaluate the grasping and manipulation performance of MuxHand. The results demonstrate that the TDMM mechanism can precisely control each cable connected to the finger joints, enabling robust grasping and dexterous manipulation. Furthermore, the fingertip load capacity reached 1.0 kg, and the magnetic joints effectively absorbed impact and corrected misalignments without damage.