Generalized Robot Learning Framework
作者: Jiahuan Yan, Zhouyang Hong, Yu Zhao, Yu Tian, Yunxin Liu, Travis Davies, Luhui Hu
分类: cs.RO, cs.AI
发布日期: 2024-09-18
备注: 6 pages, 2 figures. cs.RO
💡 一句话要点
提出一种低成本、可复现的通用机器人学习框架,适用于工业级机器人。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人学习 模仿学习 多任务学习 工业机器人 低成本 泛化性 投票阳性率 可复现性
📋 核心要点
- 现有模仿学习方法成本高昂,难以在真实环境中部署,限制了其应用范围。
- 该框架旨在降低机器人学习的成本,提高可复现性和泛化性,使其适用于各种机器人和环境。
- 实验证明,该框架可以使用更少的演示数据和简单的网络架构实现工业级机器人的多任务学习。
📝 摘要(中文)
基于模仿的机器人学习因其在可迁移性和泛化性方面的理论潜力而备受关注。然而,它在硬件和数据收集方面成本高昂,且在实际环境中部署需要精细的机器人设置和精确的实验条件。本文提出了一种低成本的机器人学习框架,该框架易于复现,并且可以迁移到各种机器人和环境中。我们证明了可部署的模仿学习可以成功应用于工业级机器人,而不仅仅是昂贵的协作机器人手臂。此外,我们的结果表明,使用简单的网络架构和比以前认为的更少的演示数据,可以实现多任务机器人学习。由于目前在实际操作任务中的评估方法几乎是主观的,因此我们提出了一种新的评估策略——投票阳性率(Voting Positive Rate,VPR),它提供了更客观的性能评估。我们对各种自行设计的任务进行了广泛的成功率比较,以验证我们的方法。为了促进合作并支持机器人学习社区,我们已在huggingface.co/ZhiChengAI上开源了所有相关数据集和模型检查点。
🔬 方法详解
问题定义:现有基于模仿学习的机器人学习方法,在硬件成本、数据收集成本以及环境设置方面都存在较高的门槛。尤其是在工业级机器人上的应用,往往需要昂贵的协作机器人和大量的精确数据。此外,真实操作任务的评估缺乏客观性标准。
核心思路:该论文的核心思路是设计一个低成本、易于复现且具有良好泛化能力的机器人学习框架。通过简化网络结构、减少所需演示数据量,并提出一种新的客观评估指标,使得模仿学习能够更容易地应用于各种机器人和环境,包括工业级机器人。
技术框架:论文提出的框架的具体架构未知,但可以推断其包含以下几个主要模块:1) 数据收集模块:用于收集机器人操作的演示数据。2) 模型训练模块:使用收集到的数据训练模仿学习模型。3) 任务执行模块:将训练好的模型部署到机器人上执行任务。4) 评估模块:使用投票阳性率(VPR)评估机器人执行任务的性能。
关键创新:该论文的关键创新点在于:1) 提出了一个低成本、易于复现的机器人学习框架,降低了模仿学习的门槛。2) 证明了简单的网络架构和少量演示数据即可实现工业级机器人的多任务学习。3) 提出了投票阳性率(VPR)这一新的评估指标,提高了机器人操作任务评估的客观性。
关键设计:论文中关于网络结构、损失函数和参数设置等技术细节描述不足,具体实现未知。但可以推测,为了降低成本和提高泛化性,可能采用了轻量级的网络结构,并使用了正则化等技术来防止过拟合。投票阳性率(VPR)的具体计算方法也需要进一步查阅相关资料。
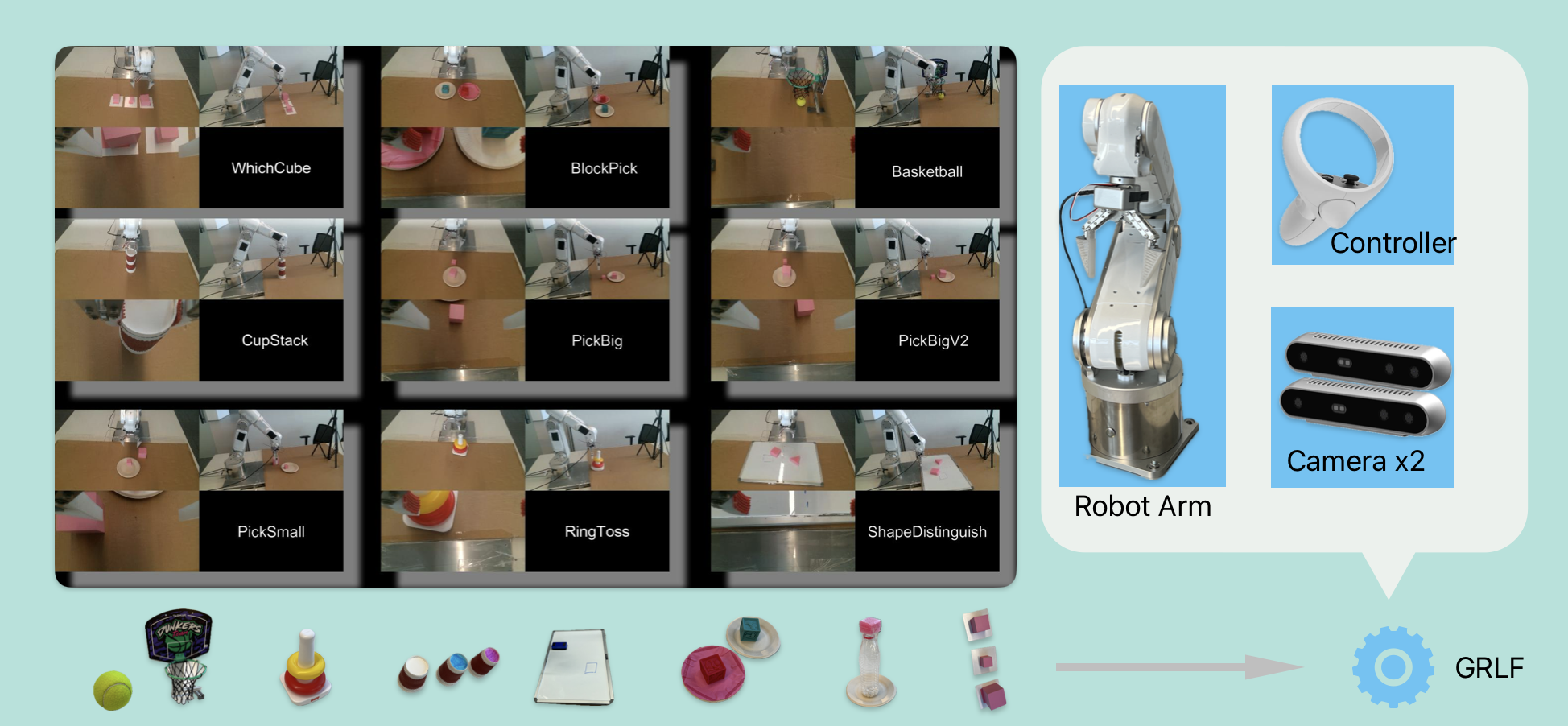
🖼️ 关键图片


📊 实验亮点
该研究表明,即使使用简单的网络架构和较少的演示数据,也可以在工业级机器人上成功实现多任务学习。此外,提出的投票阳性率(VPR)为机器人操作任务的评估提供了一种更客观的方法。具体性能数据和对比基线需要在论文中进一步查找。
🎯 应用场景
该研究成果可广泛应用于工业自动化、服务机器人等领域。例如,可以用于训练工业机器人完成各种装配、搬运等任务,也可以用于开发家庭服务机器人,使其能够执行清洁、烹饪等任务。该框架的低成本和易于复现的特点,有望加速机器人技术的普及和应用。
📄 摘要(原文)
Imitation based robot learning has recently gained significant attention in the robotics field due to its theoretical potential for transferability and generalizability. However, it remains notoriously costly, both in terms of hardware and data collection, and deploying it in real-world environments demands meticulous setup of robots and precise experimental conditions. In this paper, we present a low-cost robot learning framework that is both easily reproducible and transferable to various robots and environments. We demonstrate that deployable imitation learning can be successfully applied even to industrial-grade robots, not just expensive collaborative robotic arms. Furthermore, our results show that multi-task robot learning is achievable with simple network architectures and fewer demonstrations than previously thought necessary. As the current evaluating method is almost subjective when it comes to real-world manipulation tasks, we propose Voting Positive Rate (VPR) - a novel evaluation strategy that provides a more objective assessment of performance. We conduct an extensive comparison of success rates across various self-designed tasks to validate our approach. To foster collaboration and support the robot learning community, we have open-sourced all relevant datasets and model checkpoints, available at huggingface.co/ZhiChengAI.