AlignBot: Aligning VLM-powered Customized Task Planning with User Reminders Through Fine-Tuning for Household Robots
作者: Zhaxizhuoma Zhaxizhuoma, Pengan Chen, Ziniu Wu, Jiawei Sun, Dong Wang, Peng Zhou, Nieqing Cao, Yan Ding, Bin Zhao, Xuelong Li
分类: cs.RO, cs.AI, cs.IR
发布日期: 2024-09-18 (更新: 2025-03-21)
💡 一句话要点
AlignBot:通过微调对齐用户提醒,优化VLM驱动的家庭机器人定制任务规划。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 家庭机器人 任务规划 视觉语言模型 用户提醒 微调 GPT-4o 多模态学习
📋 核心要点
- 家庭机器人任务规划面临用户提醒信息不足、多样性差和多模态的挑战,导致难以进行个性化定制。
- AlignBot通过微调LLaVA-7B作为GPT-4o的适配器,将用户提醒转化为结构化指令,并结合动态检索历史成功案例来优化任务规划。
- 实验结果表明,AlignBot在真实家庭环境中显著提升了定制任务规划的成功率,达到86.8%,相比GPT-4o基线提升了65%。
📝 摘要(中文)
本文提出了AlignBot,一个旨在优化VLM驱动的家庭机器人定制任务规划的新框架,通过有效地与用户提醒对齐。在家庭环境中,由于提醒的数量、多样性和多模态性质的限制,将任务规划与用户提醒对齐面临着重大挑战。为了解决这些挑战,AlignBot采用了一个微调的LLaVA-7B模型,作为GPT-4o的适配器。该适配器模型将各种形式的用户提醒(如个性化偏好、纠正性指导和情境辅助)内在化为结构化的指令格式提示,从而提示GPT-4o生成定制的任务计划。此外,AlignBot集成了一种动态检索机制,选择与任务相关的历史成功案例作为GPT-4o的提示,进一步提高任务规划的准确性。为了验证AlignBot的有效性,在真实的家庭环境中进行了实验,这些环境是在实验室中构建的,以复制典型的家庭环境。一个包含来自志愿者提醒的1500多个条目的多模态数据集被用于训练和评估。结果表明,AlignBot通过解释和对齐用户提醒,显著改进了定制任务规划,优于现有的LLM和VLM驱动的规划器,实现了86.8%的成功率,而vanilla GPT-4o基线的成功率为21.6%,反映了65%的改进和超过四倍的有效性。
🔬 方法详解
问题定义:论文旨在解决家庭机器人任务规划中,如何有效利用用户提供的有限、多样且多模态的提醒信息,实现个性化和准确的任务规划。现有方法难以充分理解和利用这些提醒,导致任务规划效果不佳。
核心思路:AlignBot的核心思路是将用户提醒信息转化为结构化的指令提示,并结合历史成功案例,从而引导大型语言模型(GPT-4o)生成更符合用户需求的定制化任务计划。通过微调视觉语言模型(VLM)来理解和处理多模态提醒,并利用动态检索机制来增强任务规划的准确性。
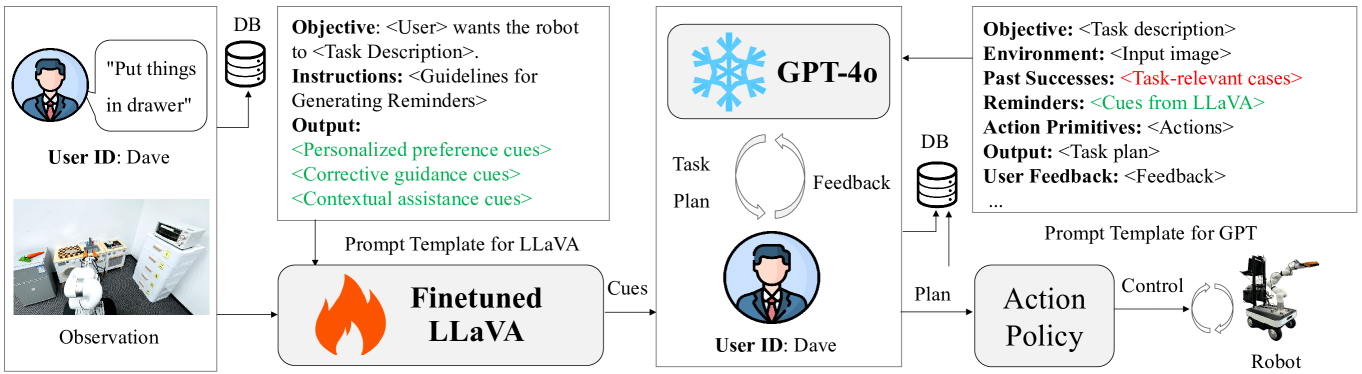
技术框架:AlignBot的整体框架包含以下几个主要模块:1) 用户提醒输入模块,接收各种形式的用户提醒(文本、图像等);2) LLaVA-7B适配器模块,通过微调LLaVA-7B模型,将用户提醒转化为结构化的指令格式提示;3) 动态检索模块,从历史任务执行记录中检索与当前任务相关的成功案例;4) GPT-4o任务规划模块,利用GPT-4o模型,根据指令提示和检索到的历史案例生成定制的任务计划。
关键创新:AlignBot的关键创新在于:1) 利用微调的LLaVA-7B模型作为适配器,有效地将多模态用户提醒转化为结构化的指令提示,从而更好地引导GPT-4o进行任务规划;2) 集成了动态检索机制,利用历史成功案例来增强任务规划的准确性和可靠性。
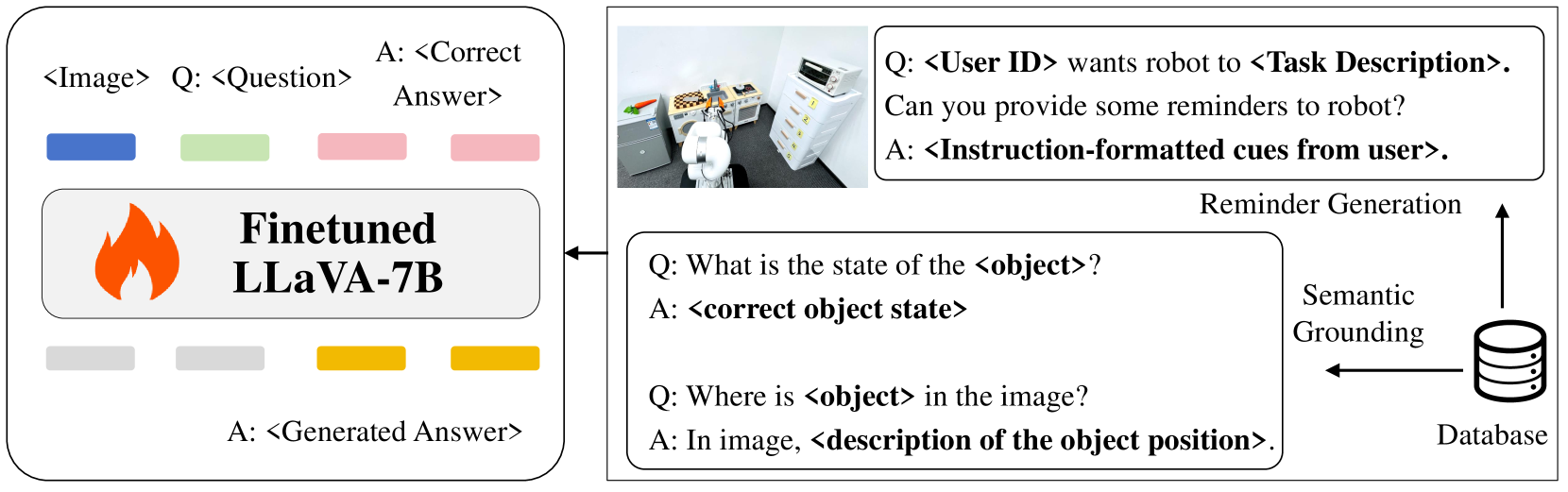
关键设计:LLaVA-7B模型的微调采用了包含1500多个条目的多模态数据集,这些数据来源于志愿者提供的提醒信息。微调的目标是使LLaVA-7B能够准确理解用户提醒的意图,并将其转化为适合GPT-4o理解的指令格式。动态检索模块采用了基于相似度的检索算法,选择与当前任务最相关的历史成功案例。GPT-4o的任务规划模块则采用了标准的prompting技术,将指令提示和检索到的历史案例作为输入,生成任务计划。
🖼️ 关键图片
📊 实验亮点
AlignBot在真实家庭环境的实验中表现出色,定制任务规划的成功率达到86.8%,相比于vanilla GPT-4o基线的21.6%提升了65%,效果提升超过四倍。实验结果表明,AlignBot能够有效理解和利用用户提醒,显著提高家庭机器人的任务规划能力,优于现有的LLM和VLM驱动的规划器。
🎯 应用场景
AlignBot技术可广泛应用于家庭服务机器人、智能家居系统等领域,提升机器人与用户的交互体验,实现更智能、个性化的任务执行。通过理解用户习惯和偏好,机器人能够更好地适应家庭环境,提供更贴心的服务,例如自动调整清洁计划、提醒用户重要事项等。未来,该技术有望扩展到更复杂的任务场景,如医疗辅助、老年人照护等。
📄 摘要(原文)
This paper presents AlignBot, a novel framework designed to optimize VLM-powered customized task planning for household robots by effectively aligning with user reminders. In domestic settings, aligning task planning with user reminders poses significant challenges due to the limited quantity, diversity, and multimodal nature of the reminders. To address these challenges, AlignBot employs a fine-tuned LLaVA-7B model, functioning as an adapter for GPT-4o. This adapter model internalizes diverse forms of user reminders-such as personalized preferences, corrective guidance, and contextual assistance-into structured instruction-formatted cues that prompt GPT-4o in generating customized task plans. Additionally, AlignBot integrates a dynamic retrieval mechanism that selects task-relevant historical successes as prompts for GPT-4o, further enhancing task planning accuracy. To validate the effectiveness of AlignBot, experiments are conducted in real-world household environments, which are constructed within the laboratory to replicate typical household settings. A multimodal dataset with over 1,500 entries derived from volunteer reminders is used for training and evaluation. The results demonstrate that AlignBot significantly improves customized task planning, outperforming existing LLM- and VLM-powered planners by interpreting and aligning with user reminders, achieving 86.8% success rate compared to the vanilla GPT-4o baseline at 21.6%, reflecting a 65% improvement and over four times greater effectiveness. Supplementary materials are available at: https://yding25.com/AlignBot/