GLC-SLAM: Gaussian Splatting SLAM with Efficient Loop Closure
作者: Ziheng Xu, Qingfeng Li, Chen Chen, Xuefeng Liu, Jianwei Niu
分类: cs.RO
发布日期: 2024-09-17
💡 一句话要点
GLC-SLAM:基于高斯溅射的SLAM系统,通过高效回环闭合解决地图漂移问题
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: SLAM 3D高斯溅射 回环闭合 全局优化 机器人导航
📋 核心要点
- 现有基于3D高斯溅射的SLAM方法在大规模场景中存在累积误差和地图漂移问题。
- GLC-SLAM通过全局优化相机姿态和场景模型,并采用分层回环闭合策略来最小化漂移。
- 实验结果表明,GLC-SLAM在跟踪和建图性能上优于或可与先进的RGB-D SLAM系统媲美。
📝 摘要(中文)
本文提出了一种名为GLC-SLAM的高斯溅射SLAM系统,旨在解决现有基于3D高斯溅射(3DGS)的SLAM方法在大规模环境中存在的累积跟踪误差和地图漂移问题。该系统集成了相机姿态和场景模型的全局优化,采用帧到模型的跟踪方式,并利用全局到局部的分层回环闭合策略来最小化漂移累积。通过将场景划分为3D高斯子图,系统能够在大型场景中进行回环校正后高效地更新地图。此外,系统采用不确定性最小化的关键帧选择策略,优先选择观察到更有价值的3D高斯的关键帧,以增强子图优化。实验结果表明,GLC-SLAM在各种数据集上实现了优于或可与最先进的密集RGB-D SLAM系统相媲美的跟踪和建图性能。
🔬 方法详解
问题定义:现有基于3D高斯溅射的SLAM方法,尤其是在大规模环境中,会由于跟踪误差的累积而导致地图漂移,影响建图精度和后续应用。因此,需要一种能够有效抑制累积误差,实现高精度、大规模场景建图的SLAM系统。
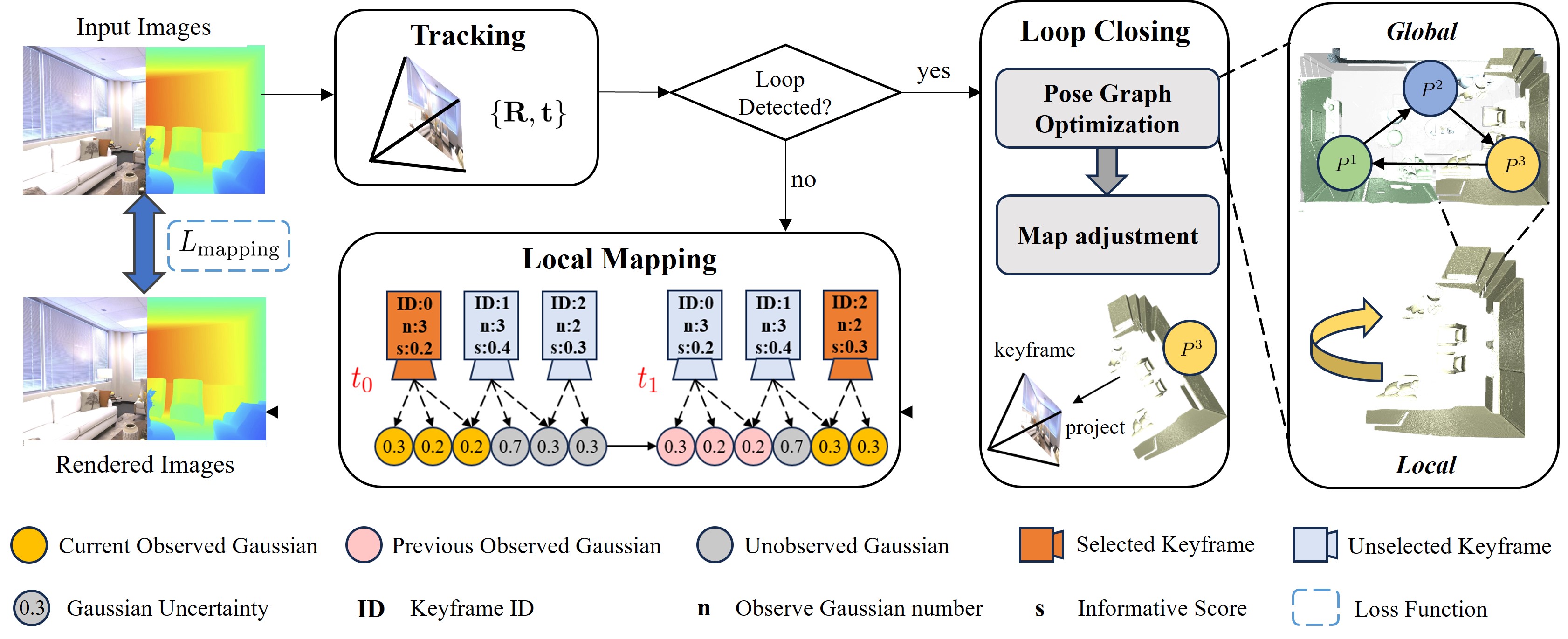
核心思路:GLC-SLAM的核心思路是通过全局优化来纠正累积误差,并采用分层回环闭合策略来进一步减小地图漂移。具体来说,系统首先进行帧到模型的跟踪,然后检测潜在的回环,并通过全局优化调整相机姿态和3D高斯模型,从而实现全局一致的地图。
技术框架:GLC-SLAM系统主要包含以下几个模块:1) 帧到模型跟踪模块,用于估计当前帧的相机姿态;2) 关键帧选择模块,选择具有代表性的帧作为关键帧;3) 回环检测模块,采用全局到局部的策略检测潜在的回环;4) 全局优化模块,利用回环信息优化相机姿态和3D高斯模型;5) 地图更新模块,在回环校正后高效地更新3D高斯子图。
关键创新:GLC-SLAM的关键创新在于集成了全局优化和分层回环闭合策略,能够有效地抑制累积误差和地图漂移。此外,系统还提出了不确定性最小化的关键帧选择策略,优先选择包含更多信息的关键帧,从而提高全局优化的效果。
关键设计:在回环检测方面,系统采用全局图像描述子进行粗略的回环检测,然后使用局部特征进行精确匹配。在全局优化方面,系统使用Bundle Adjustment优化相机姿态和3D高斯参数。关键帧选择策略基于3D高斯的不确定性,选择不确定性较低的3D高斯对应的关键帧。
🖼️ 关键图片


📊 实验亮点
GLC-SLAM在多个数据集上进行了实验验证,结果表明其在跟踪精度和建图质量上均优于或可与最先进的RGB-D SLAM系统相媲美。具体而言,GLC-SLAM能够有效地抑制累积误差,实现高精度的大规模场景建图,并在回环闭合后能够快速更新地图。
🎯 应用场景
GLC-SLAM在机器人导航、增强现实、虚拟现实、三维重建等领域具有广泛的应用前景。高精度的地图可以用于机器人的自主导航和环境理解,增强现实应用可以将虚拟物体与真实场景进行精确对齐,虚拟现实应用可以提供更逼真的沉浸式体验,三维重建可以用于文物保护和城市建模等。
📄 摘要(原文)
3D Gaussian Splatting (3DGS) has gained significant attention for its application in dense Simultaneous Localization and Mapping (SLAM), enabling real-time rendering and high-fidelity mapping. However, existing 3DGS-based SLAM methods often suffer from accumulated tracking errors and map drift, particularly in large-scale environments. To address these issues, we introduce GLC-SLAM, a Gaussian Splatting SLAM system that integrates global optimization of camera poses and scene models. Our approach employs frame-to-model tracking and triggers hierarchical loop closure using a global-to-local strategy to minimize drift accumulation. By dividing the scene into 3D Gaussian submaps, we facilitate efficient map updates following loop corrections in large scenes. Additionally, our uncertainty-minimized keyframe selection strategy prioritizes keyframes observing more valuable 3D Gaussians to enhance submap optimization. Experimental results on various datasets demonstrate that GLC-SLAM achieves superior or competitive tracking and mapping performance compared to state-of-the-art dense RGB-D SLAM systems.