Efficient Computation of Whole-Body Control Utilizing Simplified Whole-Body Dynamics via Centroidal Dynamics
作者: Junewhee Ahn, Jaesug Jung, Yisoo Lee, Hokyun Lee, Sami Haddadin, Jaeheung Park
分类: cs.RO
发布日期: 2024-09-17 (更新: 2024-12-30)
备注: submitted to IJCAS, under review
💡 一句话要点
提出基于质心动力学的简化全身动力学方法,高效计算人形机器人全身控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 全身控制 人形机器人 质心动力学 计算效率 动力学建模
📋 核心要点
- 人形机器人全身控制因其高自由度而面临计算复杂度高的挑战,现有方法难以满足实时性需求。
- 该论文提出利用质心动力学简化非约束链的动力学模型,从而降低整体计算复杂度,提高控制效率。
- 仿真实验表明,该方法显著减少了处理时间,尤其是在高自由度机器人模型中,计算效率提升更为明显。
📝 摘要(中文)
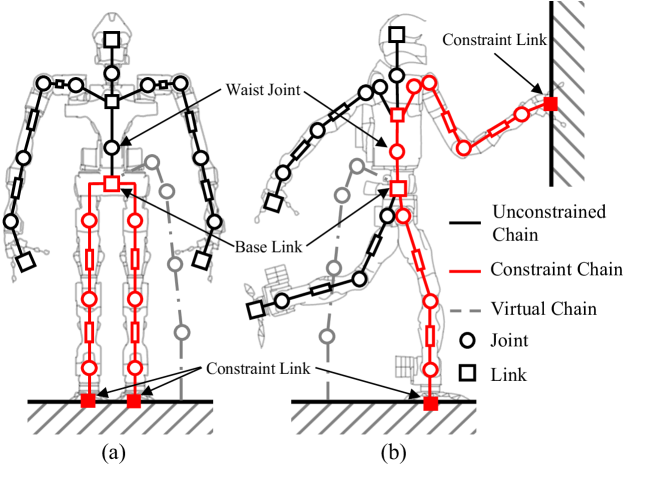
本研究提出了一种新方法,旨在提高人形机器人全身控制的计算效率,尤其是在其高自由度带来的挑战下。该方法通过将机器人的运动链分割为约束链和非约束链,构建了浮动基座机器人的降维刚体动力学模型。通过质心动力学简化非约束链的动力学。所提出的动力学模型可以应用于全身控制方法,从而将问题分解为两个部分,以实现更高效的计算。通过仿真对比实验验证了该框架的效率。计算结果表明,处理时间显著减少,优于当前方法报告的时间。此外,结果还表明,计算效率随着机器人模型自由度的增加而提高。
🔬 方法详解
问题定义:人形机器人全身控制需要处理大量的自由度,导致计算复杂度高,难以实现实时的控制。现有的全身控制方法通常需要求解复杂的动力学方程,计算量大,难以满足实际应用的需求。因此,如何降低全身控制的计算复杂度,提高控制效率,是本研究要解决的关键问题。
核心思路:该论文的核心思路是利用质心动力学来简化非约束链的动力学模型。质心动力学描述了机器人整体的运动状态,而忽略了各个关节的细节运动。通过将机器人的运动链分割为约束链和非约束链,只对非约束链使用质心动力学进行简化,从而在保证控制精度的前提下,降低计算复杂度。
技术框架:该方法首先将机器人的运动链分割为约束链和非约束链。然后,对非约束链使用质心动力学进行建模,得到简化的动力学方程。接下来,将简化的动力学方程与约束链的动力学方程结合起来,构建整体的动力学模型。最后,将该动力学模型应用于全身控制方法中,实现对人形机器人的全身控制。整个框架将全身控制问题分解为两个部分:约束链控制和非约束链控制,从而实现更高效的计算。
关键创新:该论文的关键创新在于利用质心动力学来简化非约束链的动力学模型。与传统的全身控制方法相比,该方法不需要求解复杂的动力学方程,而是通过求解简化的质心动力学方程来实现控制。这种方法可以显著降低计算复杂度,提高控制效率。
关键设计:论文的关键设计在于如何将机器人的运动链分割为约束链和非约束链,以及如何将简化的质心动力学方程与约束链的动力学方程结合起来。具体的分割策略和结合方法需要在实际应用中进行调整和优化,以达到最佳的控制效果。论文中没有明确给出具体的参数设置、损失函数或网络结构等技术细节,这些可能需要根据具体的机器人模型和控制任务进行设计。
🖼️ 关键图片


📊 实验亮点
仿真实验结果表明,该方法能够显著减少全身控制的计算时间,尤其是在高自由度机器人模型中。与现有方法相比,该方法在计算效率方面有显著提升。论文中提到计算结果优于当前方法报告的时间,但没有给出具体的性能数据和提升幅度,这部分信息未知。
🎯 应用场景
该研究成果可应用于人形机器人、外骨骼机器人等高自由度机器人的全身运动控制,尤其是在需要快速响应和实时控制的场景中,如人机协作、复杂地形行走、运动技能学习等。通过降低计算复杂度,该方法有望提升机器人的自主性和适应性,使其能够更好地服务于人类。
📄 摘要(原文)
In this study, we present a novel method for enhancing the computational efficiency of whole-body control for humanoid robots, a challenge accentuated by their high degrees of freedom. The reduced-dimension rigid body dynamics of a floating base robot is constructed by segmenting its kinematic chain into constrained and unconstrained chains, simplifying the dynamics of the unconstrained chain through the centroidal dynamics. The proposed dynamics model is possible to be applied to whole-body control methods, allowing the problem to be divided into two parts for more efficient computation. The efficiency of the framework is demonstrated by comparative experiments in simulations. The calculation results demonstrate a significant reduction in processing time, highlighting an improvement over the times reported in current methodologies. Additionally, the results also shows the computational efficiency increases as the degrees of freedom of robot model increases.