A variational approach to geometric mechanics for undulating robotic locomotion
作者: Sean Even, Patrick S. Martinez, Cora Keogh, Oliver Gross, Yasemin Ozkan-Aydin, Peter Schröder
分类: cs.RO
发布日期: 2024-09-17
💡 一句话要点
基于变分几何力学的波动机器人运动建模与仿真
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 波动机器人 几何力学 变分积分器 耗散度量 运动建模
📋 核心要点
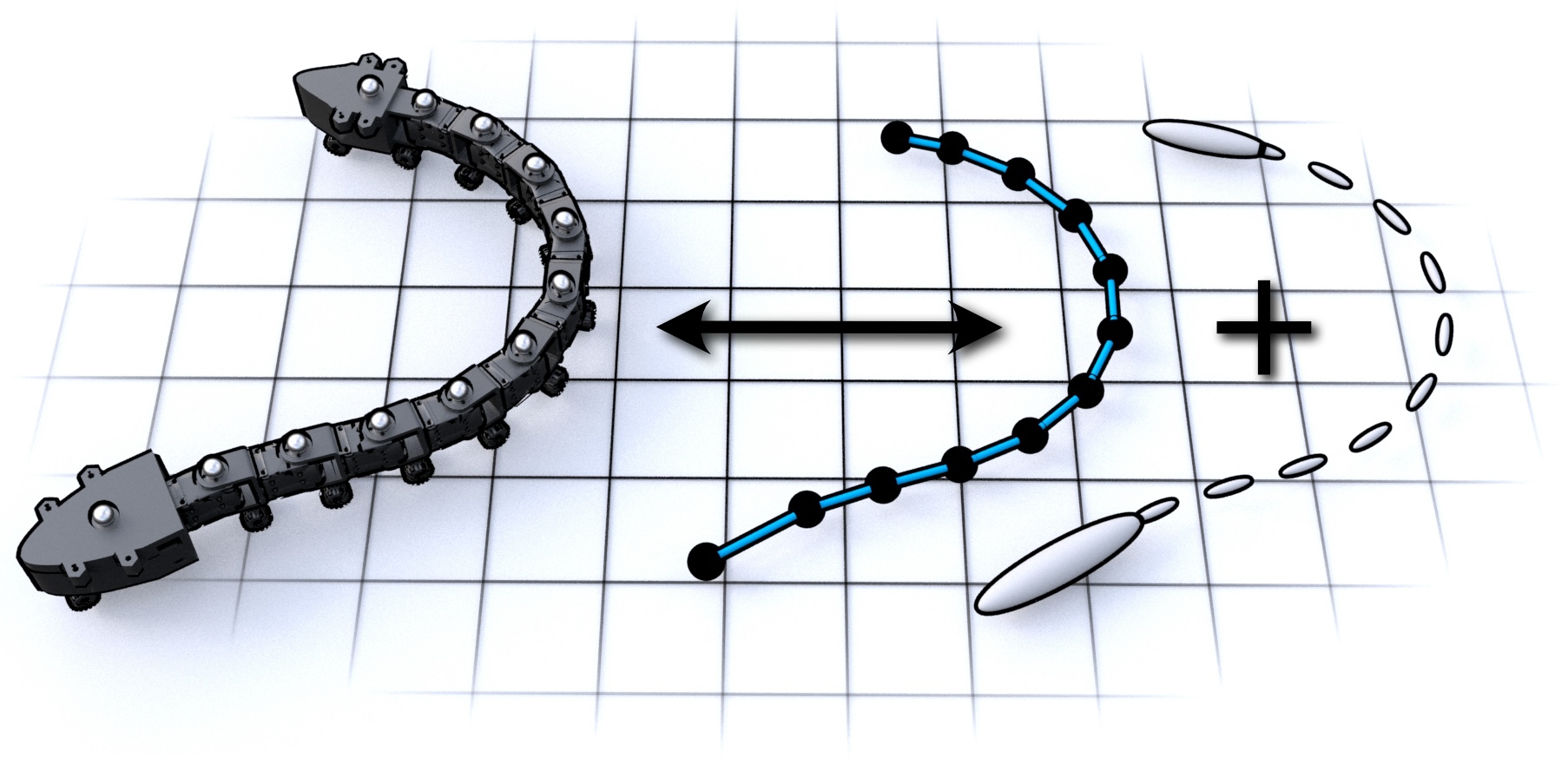
- 波动运动是无肢生物常见的运动方式,但理论模型与实际机器人实验之间存在差距,难以有效建模。
- 论文提出一种基于变分几何力学的建模方法,利用耗散度量来近似描述机器人与环境的相互作用。
- 实验结果表明,即使模型经过简化,仿真结果与实际机器人运动轨迹在平均水平上仍具有良好的一致性。
📝 摘要(中文)
各种尺寸的无肢生物都利用自身的波动变形模式进行运动。几何力学将变形映射到运动,为形式化和研究此类运动模式的理论特性和局限性提供了一个强大的框架。然而,固有的抽象程度给弥合理论或模拟与实验室实验之间的差距带来了挑战。我们通过比较使用变分积分器进行的实验和模拟,研究了波动机器人运动轨迹建模的挑战。尽管基于几何变分原理的模型进行了广泛的简化,但模拟结果在平均水平上表现出良好的一致性。值得注意的是,我们的方法仅需要知道耗散度量——构型空间上的黎曼度量,实际上可以通过与阻力理论非常相似的方法来近似。
🔬 方法详解
问题定义:论文旨在解决波动机器人运动轨迹建模的问题。现有方法,特别是基于几何力学的建模方法,虽然在理论上很强大,但由于其抽象性,难以直接应用于实际机器人实验,存在理论与实践脱节的痛点。如何建立一个既能反映几何力学特性,又能有效简化并应用于实际机器人系统的模型是关键挑战。
核心思路:论文的核心思路是利用变分几何力学框架,并通过耗散度量来近似描述机器人与环境之间的相互作用。这种方法旨在简化模型的复杂性,使其更易于实现和应用于实际机器人系统。通过关注耗散度量,模型可以捕捉到机器人运动中的主要阻力效应,而无需详细建模复杂的环境交互。
技术框架:整体框架包括以下几个主要步骤:1) 建立基于几何力学的波动机器人运动学模型;2) 使用变分积分器对模型进行离散化,以便进行数值模拟;3) 通过实验数据估计或近似耗散度量;4) 使用估计的耗散度量进行仿真,并与实际机器人运动轨迹进行比较;5) 分析仿真结果与实验数据的差异,评估模型的有效性。
关键创新:论文的关键创新在于将变分几何力学与耗散度量相结合,提出了一种简化的波动机器人运动建模方法。这种方法只需要知道耗散度量,而无需详细建模复杂的环境交互,大大降低了建模的复杂性。此外,论文还验证了这种方法在实际机器人系统中的有效性,为波动机器人的控制和优化提供了新的思路。
关键设计:论文的关键设计包括:1) 使用变分积分器进行离散化,保证了数值模拟的能量守恒特性;2) 通过实验数据或阻力理论近似耗散度量,简化了模型参数的估计;3) 通过比较仿真结果与实际机器人运动轨迹,验证了模型的有效性。具体的参数设置和损失函数(如果使用)在论文中可能没有详细描述,需要参考相关文献。
🖼️ 关键图片


📊 实验亮点
实验结果表明,尽管模型进行了简化,但仿真结果与实际机器人运动轨迹在平均水平上表现出良好的一致性。这表明基于耗散度量的变分几何力学方法能够有效地捕捉波动机器人的主要运动特征,为实际机器人系统的建模和控制提供了一种可行的途径。具体的性能数据和提升幅度需要在论文中查找。
🎯 应用场景
该研究成果可应用于水下机器人、管道机器人等需要在复杂环境中运动的无肢机器人设计与控制。通过简化建模过程,可以更高效地进行机器人运动规划和优化,提高机器人在实际应用中的性能和鲁棒性。此外,该方法还可以推广到其他类型的柔性机器人运动建模中,具有广泛的应用前景。
📄 摘要(原文)
Limbless organisms of all sizes use undulating patterns of self-deformation to locomote. Geometric mechanics, which maps deformations to motions, provides a powerful framework to formalize and investigate the theoretical properties and limitations of such modes of locomotion. However, the inherent level of abstraction poses a challenge when bridging the gap between theory or simulations and laboratory experiments. We investigate the challenges of modeling motion trajectories of an undulating robotic locomotor by comparing experiments and simulations performed with a variational integrator. Despite the extensive simplifications that the model based on a geometric variation principle entails, the simulations show good agreement on average. Notably, our approach merely requires the knowledge of the \emph{dissipation metric} -- a Riemannian metric on the configuration space, which can in practice be approximated by means closely resembling \emph{resistive force theory}.