Safe Interval Motion Planning for Quadrotors in Dynamic Environments
作者: Songhao Huang, Yuwei Wu, Yuezhan Tao, Vijay Kumar
分类: cs.RO
发布日期: 2024-09-16 (更新: 2025-03-18)
备注: 2025 IEEE International Conference on Robotics & Automation(ICRA)
💡 一句话要点
提出基于安全区间的四旋翼动态环境运动规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四旋翼 运动规划 动态环境 安全区间 B样条曲线
📋 核心要点
- 四旋翼在动态环境中轨迹生成面临时空域非凸性挑战,现有方法难以兼顾实时性和最优性。
- 论文提出基于安全区间的运动规划框架,通过两阶段优化和动态连通可见性图确保轨迹安全。
- 实验结果表明,该方法在不同密度动态环境中成功率超过95%,优于现有方法。
📝 摘要(中文)
在动态环境中,四旋翼的轨迹生成面临着时空域非凸性的巨大挑战。现有方法通常简化环境为静态,或难以实时生成最优解。本文提出了一种高效的安全区间运动规划框架,用于动态环境下的导航。该框架定义了“安全区间”,即特定构型安全的时窗。轨迹生成分为两个阶段:前端图搜索和后端基于梯度的优化。通过构建动态连通可见性图,并在安全区间和时间走廊内加入低阶动态约束,保证了完整性和最优性。为避免局部最小值,提出了均匀时间可见性形变(UTVD)以完整评估时空拓扑等价性。使用B样条曲线表示轨迹,并应用基于梯度的优化在时空走廊内绕过静态和移动障碍物。仿真和实际实验表明,该方法在不同密度环境中成功率超过95%,优于其他方法,具有实际部署潜力。
🔬 方法详解
问题定义:论文旨在解决四旋翼在复杂动态环境中进行安全、高效运动规划的问题。现有方法在处理动态环境时,要么简化环境模型,导致规划结果不适用于实际场景;要么计算复杂度过高,无法满足实时性要求,难以应对快速变化的障碍物。此外,传统方法容易陷入局部最优解,导致规划失败。
核心思路:论文的核心思路是利用“安全区间”的概念,将复杂的动态环境分解为一系列在时间上连续的安全区域。通过在这些安全区间内进行规划,可以有效地避免碰撞,并降低规划的复杂度。同时,采用两阶段的规划策略,前端进行全局搜索,后端进行局部优化,从而兼顾全局最优性和实时性。
技术框架:该方法包含以下主要模块: 1. 安全区间计算:根据环境信息,计算出四旋翼在不同时间和位置上的安全区间。 2. 前端图搜索:构建动态连通可见性图,在安全区间内搜索一条粗略的轨迹。 3. 后端梯度优化:使用B样条曲线表示轨迹,并在时空走廊内进行基于梯度的优化,以获得平滑、安全的轨迹。 4. 均匀时间可见性形变(UTVD):用于评估时空拓扑等价性,避免陷入局部最小值。
关键创新:该方法的关键创新在于: 1. 安全区间表示:提出了一种新的环境表示方法,将动态环境分解为一系列安全区间,简化了规划问题。 2. UTVD:提出了一种新的拓扑等价性评估方法,可以有效地避免局部最小值,提高规划的成功率。 3. 动态连通可见性图:构建动态连通可见性图,保证了规划的完整性和最优性。
关键设计: 1. B样条曲线:使用B样条曲线表示轨迹,保证了轨迹的平滑性。 2. 梯度优化:采用基于梯度的优化方法,可以快速地找到局部最优解。 3. 时间走廊:在时间走廊内进行优化,可以保证轨迹的安全性。 4. 低阶动态约束:在安全区间和时间走廊内加入低阶动态约束,保证了轨迹的可执行性。
🖼️ 关键图片
📊 实验亮点
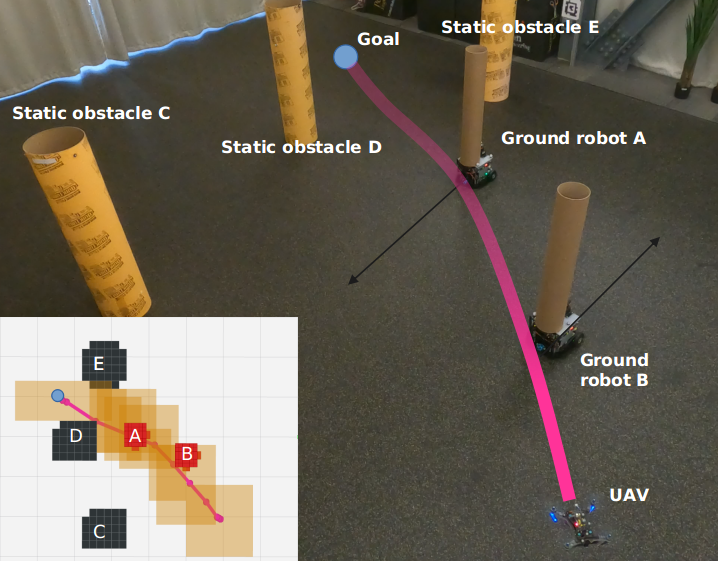
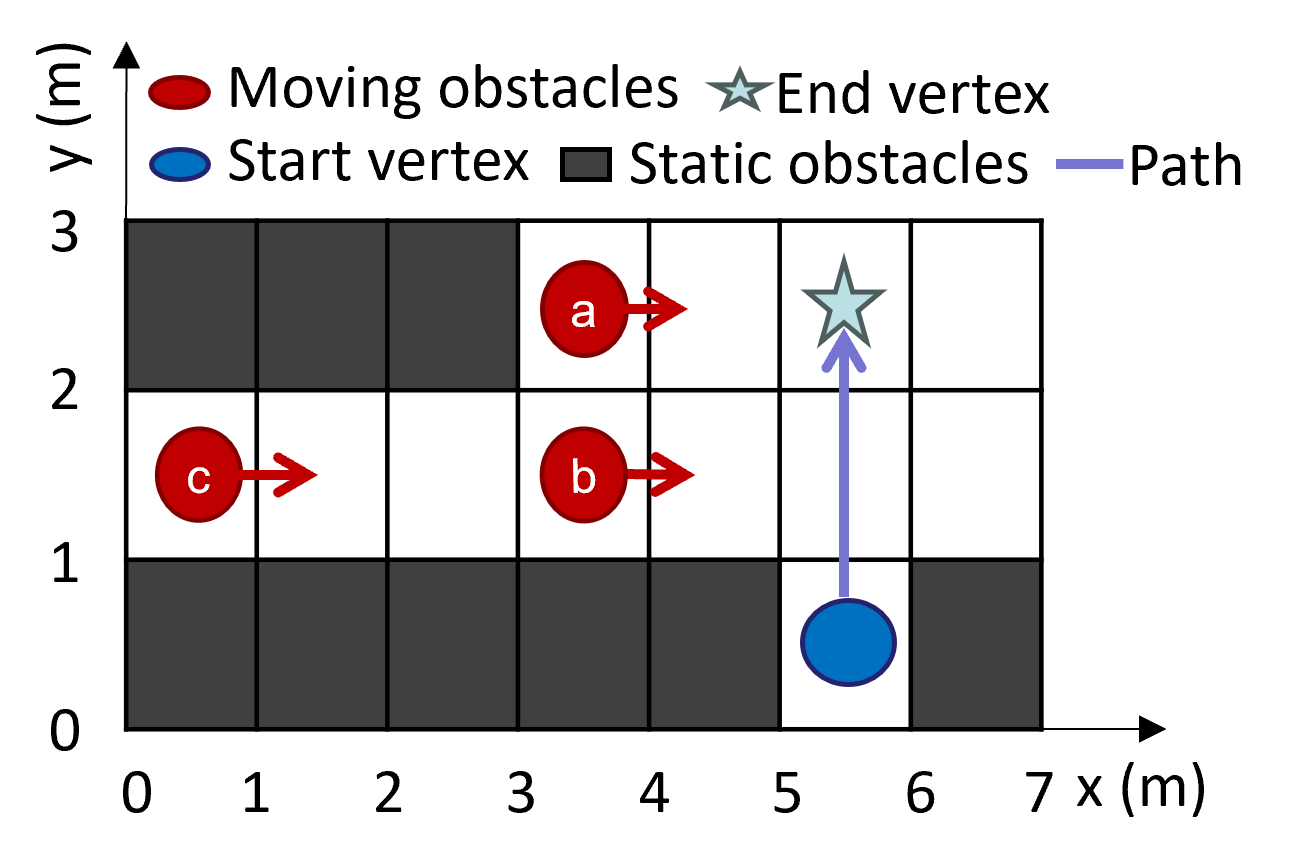
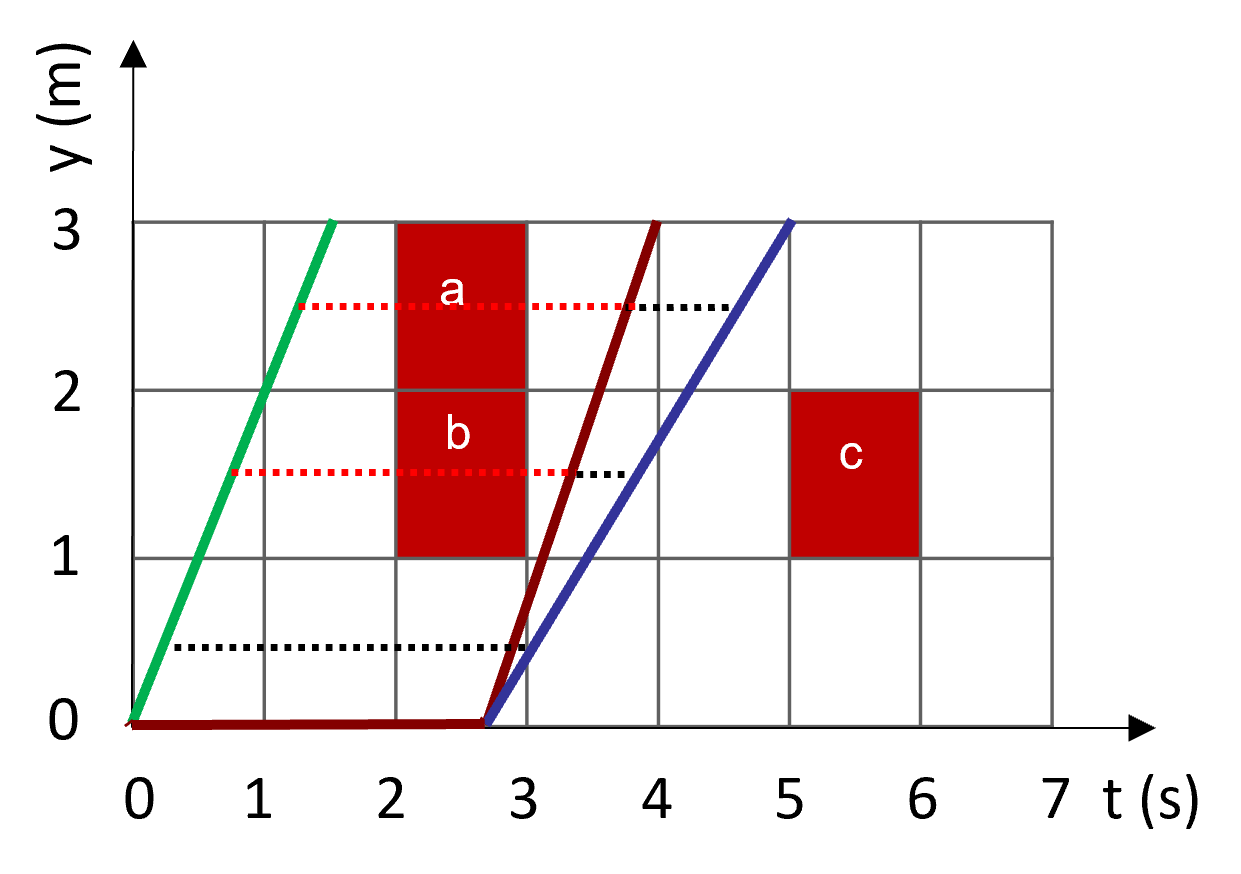
实验结果表明,该方法在不同密度动态环境中成功率超过95%,显著优于其他方法。在仿真环境中,该方法能够有效地避开静态和移动障碍物,生成平滑、安全的轨迹。在实际飞行实验中,该方法也表现出良好的鲁棒性和实时性,能够成功地完成各种复杂的导航任务。
🎯 应用场景
该研究成果可广泛应用于无人机自主导航、物流配送、环境监测、灾害救援等领域。通过在动态环境中实现安全可靠的运动规划,可以提高无人机的工作效率和安全性,扩展其应用范围。未来,该方法有望应用于更复杂的机器人系统,如自动驾驶汽车和移动机器人。
📄 摘要(原文)
Trajectory generation in dynamic environments presents a significant challenge for quadrotors, particularly due to the non-convexity in the spatial-temporal domain. Many existing methods either assume simplified static environments or struggle to produce optimal solutions in real-time. In this work, we propose an efficient safe interval motion planning framework for navigation in dynamic environments. A safe interval refers to a time window during which a specific configuration is safe. Our approach addresses trajectory generation through a two-stage process: a front-end graph search step followed by a back-end gradient-based optimization. We ensure completeness and optimality by constructing a dynamic connected visibility graph and incorporating low-order dynamic bounds within safe intervals and temporal corridors. To avoid local minima, we propose a Uniform Temporal Visibility Deformation (UTVD) for the complete evaluation of spatial-temporal topological equivalence. We represent trajectories with B-Spline curves and apply gradient-based optimization to navigate around static and moving obstacles within spatial-temporal corridors. Through simulation and real-world experiments, we show that our method can achieve a success rate of over 95% in environments with different density levels, exceeding the performance of other approaches, demonstrating its potential for practical deployment in highly dynamic environments.