Know your limits! Optimize the robot's behavior through self-awareness
作者: Esteve Valls Mascaro, Dongheui Lee
分类: cs.RO, cs.AI
发布日期: 2024-09-16 (更新: 2024-10-16)
备注: Accepted to Humanoids 2024 and HFR 2024. Project Page: https://evm7.github.io/Self-AWare
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于自感知(SAW)的深度学习模型,优化人型机器人在复杂环境中的行为控制。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion)
关键词: 人机协作 模仿学习 机器人控制 深度学习 自感知 运动规划 行为优化
📋 核心要点
- 现有模仿学习方法依赖高质量参考运动,且要求人类操作员迁就机器人能力,限制了非专业用户的应用。
- 论文提出自感知模型(SAW),使机器人能够理解并适应参考运动,根据自身能力选择最佳行为。
- SAW集成了运动生成、机器人控制和深度学习,通过预测跌倒风险、运动平滑度等指标优化机器人行为,跌倒预测准确率达99.29%。
📝 摘要(中文)
随着人形机器人从实验室走向真实世界,为非专业用户普及机器人控制至关重要。现有的人机模仿算法侧重于高精度地跟随参考人体运动,但它们容易受到参考运动质量的影响,并且要求操作员简化其动作以匹配机器人的能力。本文提出机器人应该理解参考运动并根据自身能力进行调整,从而简化操作员的任务。为此,我们引入了一个深度学习模型,该模型可以预测机器人在模仿给定参考时的性能。然后,我们的系统可以根据高级任务命令生成多个参考,为每个参考分配一个分数,并选择最佳参考以实现所需的机器人行为。我们的自感知模型(SAW)基于各种标准(例如,跌倒可能性、对参考运动的遵守程度和平滑度)对潜在的机器人行为进行排名。我们将先进的运动生成、机器人控制和SAW集成到一个独特的系统中,确保任何任务命令都能获得最佳的机器人行为。例如,SAW可以以99.29%的准确度预测跌倒。
🔬 方法详解
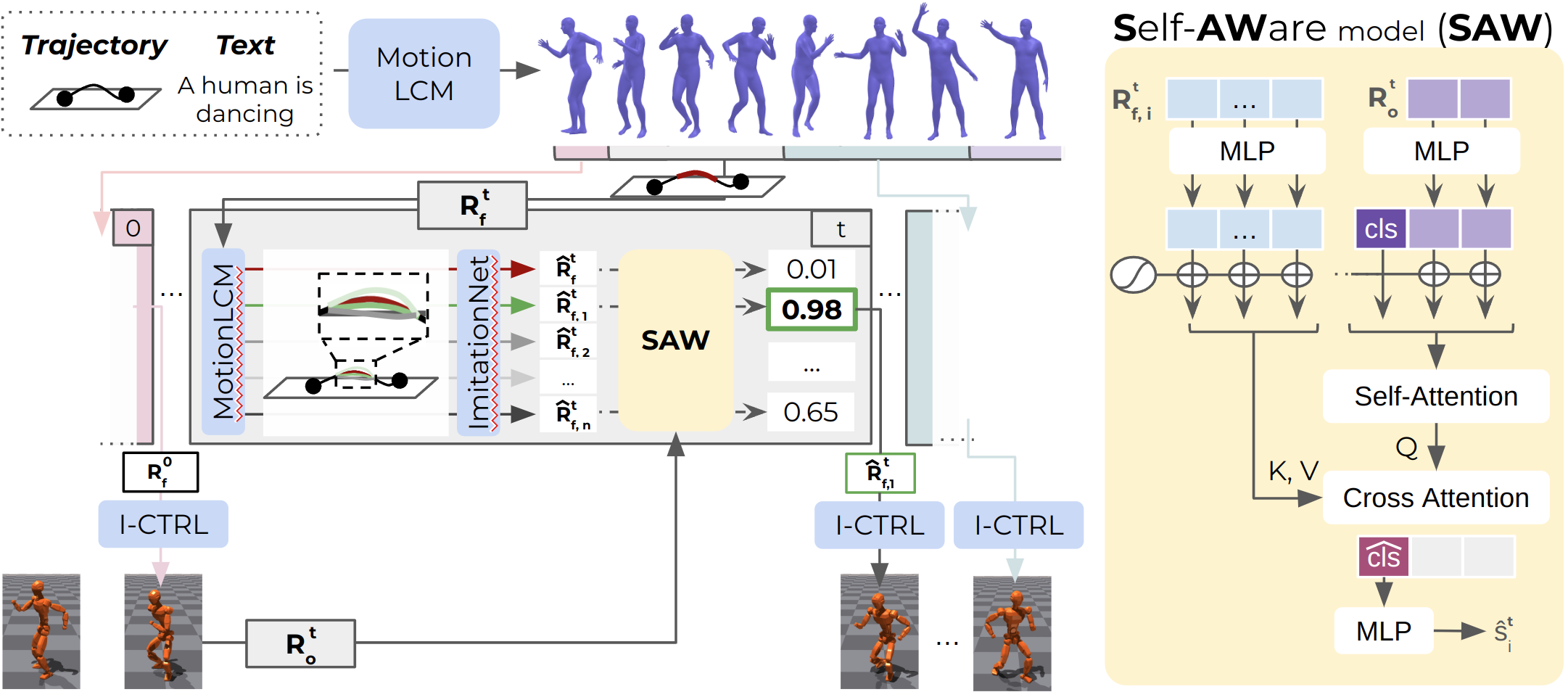
问题定义:现有的人机模仿算法通常要求人类操作员提供高质量的参考运动,并且需要操作员根据机器人的物理限制来调整动作,这对于非专业用户来说是一个挑战。这些算法没有考虑到机器人自身的感知和适应能力,导致在复杂环境中表现不佳。因此,需要一种方法,使机器人能够理解参考运动,并根据自身的能力进行调整,从而简化操作员的任务,并提高机器人在真实世界中的适应性。
核心思路:论文的核心思路是让机器人具备“自感知”能力,即能够理解自身的物理限制和运动能力,并根据这些信息来优化自身的行为。具体来说,通过训练一个深度学习模型,使机器人能够预测在模仿给定参考运动时的性能,包括跌倒的可能性、运动的平滑程度以及与参考运动的偏差等。然后,利用这些预测信息来选择最佳的参考运动,从而实现最优的机器人行为。
技术框架:该系统包含三个主要模块:运动生成模块、机器人控制模块和自感知模型(SAW)。首先,运动生成模块根据高级任务命令生成多个可能的参考运动。然后,自感知模型(SAW)对每个参考运动进行评估,预测机器人在模仿该运动时的性能指标。最后,机器人控制模块根据SAW的评估结果选择最佳的参考运动,并控制机器人执行该运动。整个系统形成一个闭环反馈,不断优化机器人的行为。
关键创新:该论文的关键创新在于提出了自感知模型(SAW),使机器人能够理解自身的物理限制和运动能力,并根据这些信息来优化自身的行为。与传统的模仿学习方法相比,SAW不需要高质量的参考运动,并且能够适应机器人的物理限制,从而提高了机器人在真实世界中的适应性。此外,将运动生成、机器人控制和SAW集成到一个统一的系统中,实现了端到端的优化。
关键设计:SAW模型是一个深度神经网络,输入是参考运动,输出是机器人性能的预测指标,例如跌倒的可能性、运动的平滑程度以及与参考运动的偏差等。模型的具体结构未知,但可以推测使用了循环神经网络(RNN)或Transformer等序列模型来处理时间序列数据。损失函数的设计需要综合考虑多个因素,例如跌倒预测的准确性、运动平滑度的优化以及与参考运动的相似性等。具体的参数设置和训练细节未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该论文提出的自感知模型(SAW)能够有效地预测机器人在模仿给定参考运动时的性能。例如,SAW可以以99.29%的准确度预测跌倒。此外,通过选择最佳的参考运动,该系统能够显著提高机器人在复杂环境中的适应性和安全性。具体的性能提升幅度未知,但从跌倒预测的准确率来看,SAW具有显著的优势。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如辅助康复、远程操作、工业自动化等。通过使机器人具备自感知能力,可以提高机器人在复杂环境中的适应性和安全性,降低操作难度,从而拓展机器人的应用范围。未来,该技术有望应用于家庭服务机器人、医疗机器人等领域,为人类提供更智能、更便捷的服务。
📄 摘要(原文)
As humanoid robots transition from labs to real-world environments, it is essential to democratize robot control for non-expert users. Recent human-robot imitation algorithms focus on following a reference human motion with high precision, but they are susceptible to the quality of the reference motion and require the human operator to simplify its movements to match the robot's capabilities. Instead, we consider that the robot should understand and adapt the reference motion to its own abilities, facilitating the operator's task. For that, we introduce a deep-learning model that anticipates the robot's performance when imitating a given reference. Then, our system can generate multiple references given a high-level task command, assign a score to each of them, and select the best reference to achieve the desired robot behavior. Our Self-AWare model (SAW) ranks potential robot behaviors based on various criteria, such as fall likelihood, adherence to the reference motion, and smoothness. We integrate advanced motion generation, robot control, and SAW in one unique system, ensuring optimal robot behavior for any task command. For instance, SAW can anticipate falls with 99.29% accuracy. For more information check our project page: https://evm7.github.io/Self-AWare