Physically-Consistent Parameter Identification of Robots in Contact
作者: Shahram Khorshidi, Murad Dawood, Benno Nederkorn, Maren Bennewitz, Majid Khadiv
分类: cs.RO
发布日期: 2024-09-15 (更新: 2025-03-18)
备注: 7 pages, 5 figures, 2 tables
💡 一句话要点
提出一种无需接触力测量的机器人惯性参数辨识方法,适用于间歇性接触环境。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人惯性参数辨识 接触力消除 零空间投影 线性矩阵不等式 四足机器人 动力学建模
📋 核心要点
- 传统机器人惯性参数辨识依赖不精确的CAD模型或接触力测量,后者在许多现代机器人上不可用。
- 该方法将整体动力学投影到接触约束的零空间,消除了对接触力测量的依赖,并将问题转化为线性矩阵不等式。
- 实验表明,该方法在Spot机器人上表现出良好的准确性和泛化能力,且样本效率高于黑盒方法。
📝 摘要(中文)
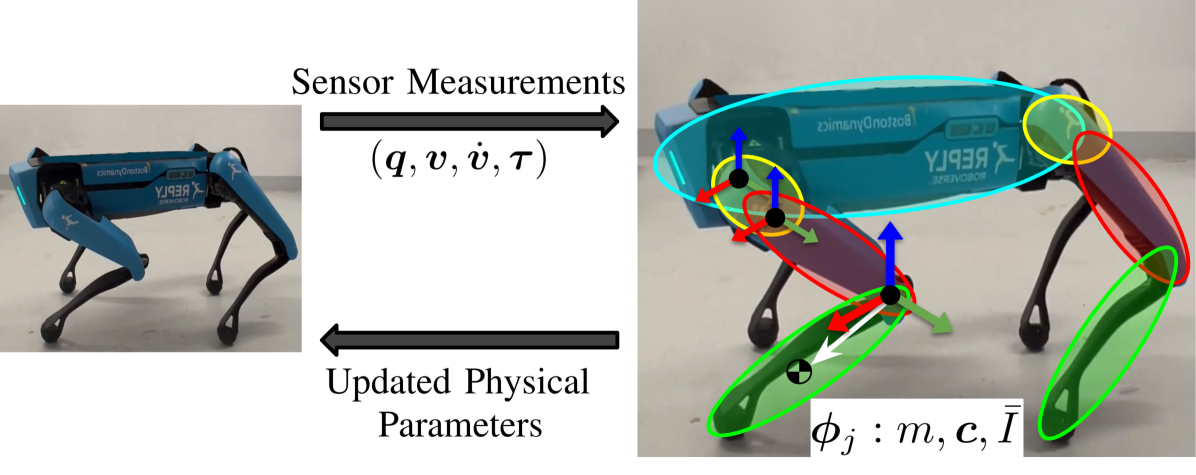
精确的惯性参数辨识对于模拟和控制与环境发生间歇性接触的机器人至关重要。传统上,机器人的惯性参数从CAD模型中获得,但CAD模型并不精确(有时甚至不可用,例如Boston Dynamics的Spot)。因此,需要进行辨识。现有的方法需要接触力测量,但现代四足和人形机器人通常不具备这种传感器。本文提出了一种替代技术,利用关节电流/扭矩测量(现代机器人的标准传感方式)来辨识惯性参数,而无需直接的接触力测量。通过将整体动力学投影到接触约束的零空间中,我们消除了对接触力的依赖,并将辨识问题重新表述为一个可以处理物理和几何约束的线性矩阵不等式。我们将提出的方法与使用深度神经网络的常见黑盒辨识方法进行了比较,结果表明,结合物理一致性可以显著提高模型的样本效率和泛化能力。最后,我们在Spot四足机器人上通过各种运动任务验证了该方法,展示了其在不同步态的真实场景中的准确性和泛化能力。
🔬 方法详解
问题定义:论文旨在解决在机器人与环境发生间歇性接触时,如何准确辨识机器人惯性参数的问题。现有方法要么依赖于不精确的CAD模型,要么需要直接测量接触力,而后者在许多现代机器人(如四足机器人)上并不具备。因此,如何在缺乏接触力测量的情况下,准确辨识机器人的惯性参数是一个挑战。
核心思路:论文的核心思路是将整体动力学方程投影到接触约束的零空间中。这意味着,通过数学变换,可以消除动力学方程中接触力的影响,从而将惯性参数辨识问题转化为一个仅依赖于关节扭矩和运动学信息的优化问题。这种方法避免了直接测量或估计接触力的需求。
技术框架:该方法主要包含以下几个阶段:1) 建立机器人的整体动力学模型,包括惯性参数、关节扭矩和接触力等。2) 确定接触约束,描述机器人与环境之间的接触关系。3) 将整体动力学方程投影到接触约束的零空间,消除接触力的影响。4) 将辨识问题转化为一个线性矩阵不等式(LMI)优化问题,该问题可以处理物理和几何约束。5) 使用优化算法求解LMI问题,得到机器人的惯性参数。
关键创新:该方法最重要的技术创新在于无需直接接触力测量即可进行惯性参数辨识。通过将动力学方程投影到接触约束的零空间,巧妙地消除了接触力的影响,使得该方法适用于缺乏接触力传感器的机器人。此外,将辨识问题转化为线性矩阵不等式,可以方便地加入物理和几何约束,提高辨识结果的可靠性。
关键设计:论文将辨识问题转化为线性矩阵不等式,并使用优化算法进行求解。具体的参数设置和损失函数选择未知,但关键在于如何构建合适的接触约束和零空间投影矩阵,以保证能够有效地消除接触力的影响,并得到准确的惯性参数估计。
🖼️ 关键图片

📊 实验亮点
该方法在Spot四足机器人上进行了验证,结果表明,与基于深度神经网络的黑盒辨识方法相比,该方法具有更高的样本效率和泛化能力。具体性能数据未知,但实验结果表明,结合物理一致性可以显著提高模型的性能,使其能够更好地适应不同的步态和真实场景。
🎯 应用场景
该研究成果可广泛应用于四足机器人、人形机器人等需要在复杂环境中运动的机器人。准确的惯性参数辨识能够提高机器人运动控制的精度和稳定性,使其能够更好地适应各种地形和任务需求。此外,该方法还可以用于机器人仿真和虚拟环境的构建,为机器人的设计和优化提供支持。
📄 摘要(原文)
Accurate inertial parameter identification is crucial for the simulation and control of robots encountering intermittent contact with the environment. Classically, robots' inertial parameters are obtained from CAD models that are not precise (and sometimes not available, e.g., Spot from Boston Dynamics), hence requiring identification. To do that, existing methods require access to contact force measurement, a modality not present in modern quadruped and humanoid robots. This paper presents an alternative technique that utilizes joint current/torque measurements -- a standard sensing modality in modern robots -- to identify inertial parameters without requiring direct contact force measurements. By projecting the whole-body dynamics into the null space of contact constraints, we eliminate the dependency on contact forces and reformulate the identification problem as a linear matrix inequality that can handle physical and geometrical constraints. We compare our proposed method against a common black-box identification method using a deep neural network and show that incorporating physical consistency significantly improves the sample efficiency and generalizability of the model. Finally, we validate our method on the Spot quadruped robot across various locomotion tasks, showcasing its accuracy and generalizability in real-world scenarios over different gaits.