Behavior Tree Generation using Large Language Models for Sequential Manipulation Planning with Human Instructions and Feedback
作者: Jicong Ao, Yansong Wu, Fan Wu, Sami Haddadin
分类: cs.RO
发布日期: 2024-09-14
期刊: ICRA 2024 Workshop Exploring Role Allocation in Human-Robot Co-Manipulation
💡 一句话要点
提出基于LLM的行为树生成框架,用于人机协作的序列操作规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 行为树生成 大型语言模型 人机协作 序列操作规划 机器人装配
📋 核心要点
- 现有序列操作规划方法在人机协作和非专业人员直观编程方面存在不足,难以有效利用人类知识。
- 提出基于LLM的行为树生成框架,通过人类指令和反馈,实现更自然、高效的人机协作任务规划。
- 在真实机器人装配任务中验证了该框架的有效性,评估了成功率、逻辑连贯性等指标。
📝 摘要(中文)
本文提出了一种基于大型语言模型(LLM)的行为树(BT)生成框架,旨在充分利用两者的优势进行序列操作规划。该框架通过人类指令启动动作序列的生成,并利用人类反馈在运行时改进BT的生成,从而实现人机协作的任务规划,并增强非专业人员对机器人的直观编程能力。框架中的所有方法都在真实的机器人装配示例中进行了测试,该示例使用了西门子机器人装配挑战赛中的齿轮组模型。我们使用带有工具更换机构的单个机械臂,这在柔性制造中很常见,以方便稳健地抓取各种物体。实验结果从成功率、逻辑连贯性、可执行性、时间消耗和token消耗等方面进行了评估。据我们所知,这是第一个以人为指导的、基于LLM的BT生成框架,它统一了各种使用LLM的合理方法,以完全生成可在真实测试平台上执行的BT,并考虑了工具使用的细粒度知识。
🔬 方法详解
问题定义:现有序列操作规划方法难以有效融合人类的指令和反馈,导致人机协作效率低下,非专业人员难以直观地编程机器人。尤其是在复杂操作任务中,如何将人类的意图转化为机器人可执行的动作序列是一个挑战。
核心思路:利用大型语言模型(LLM)强大的自然语言理解和生成能力,将人类指令转化为行为树(BT),并通过人类反馈在运行时动态调整BT。这种方法旨在弥合人类意图和机器人执行之间的差距,使非专业人员也能轻松地指导机器人完成复杂任务。
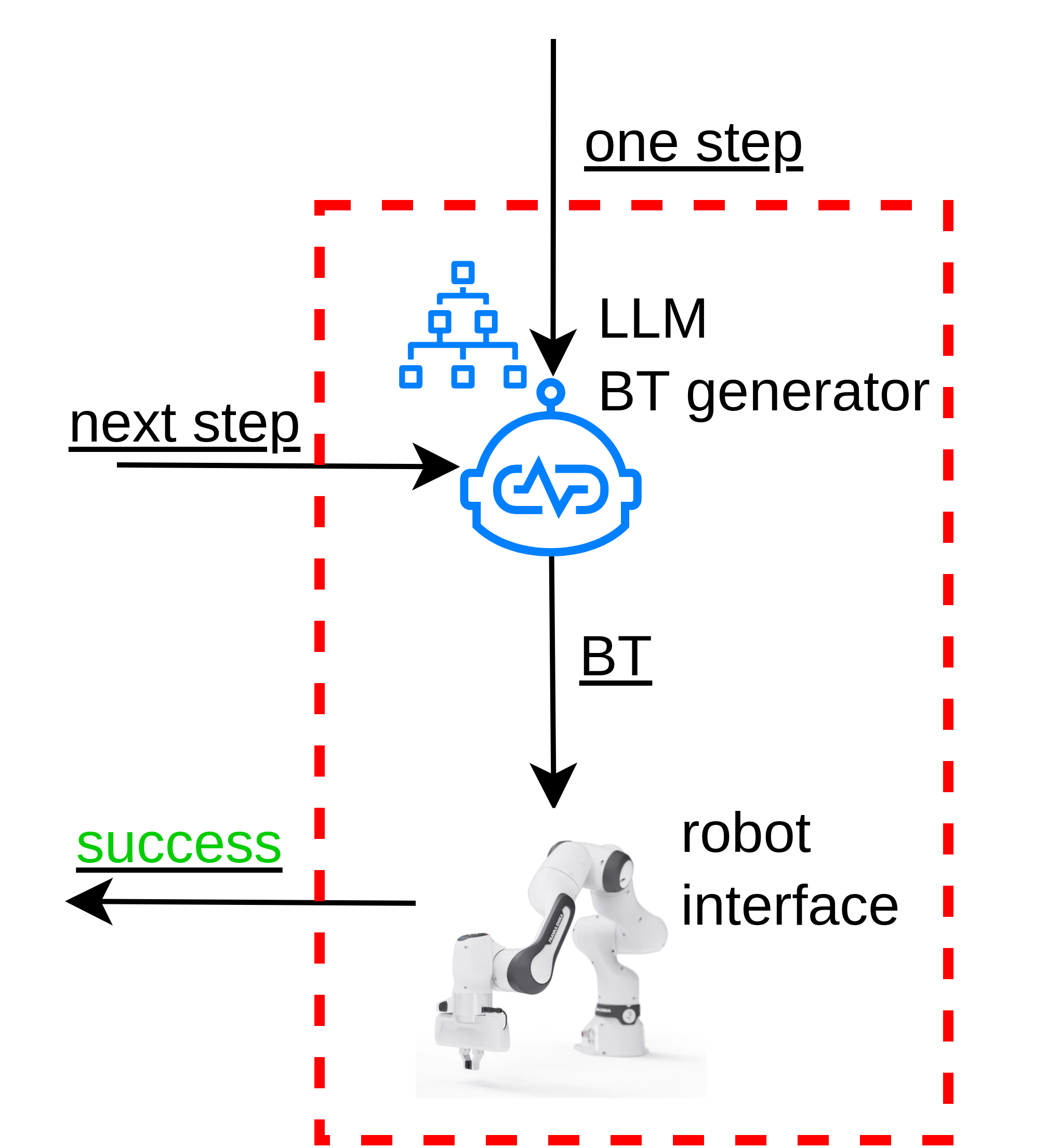
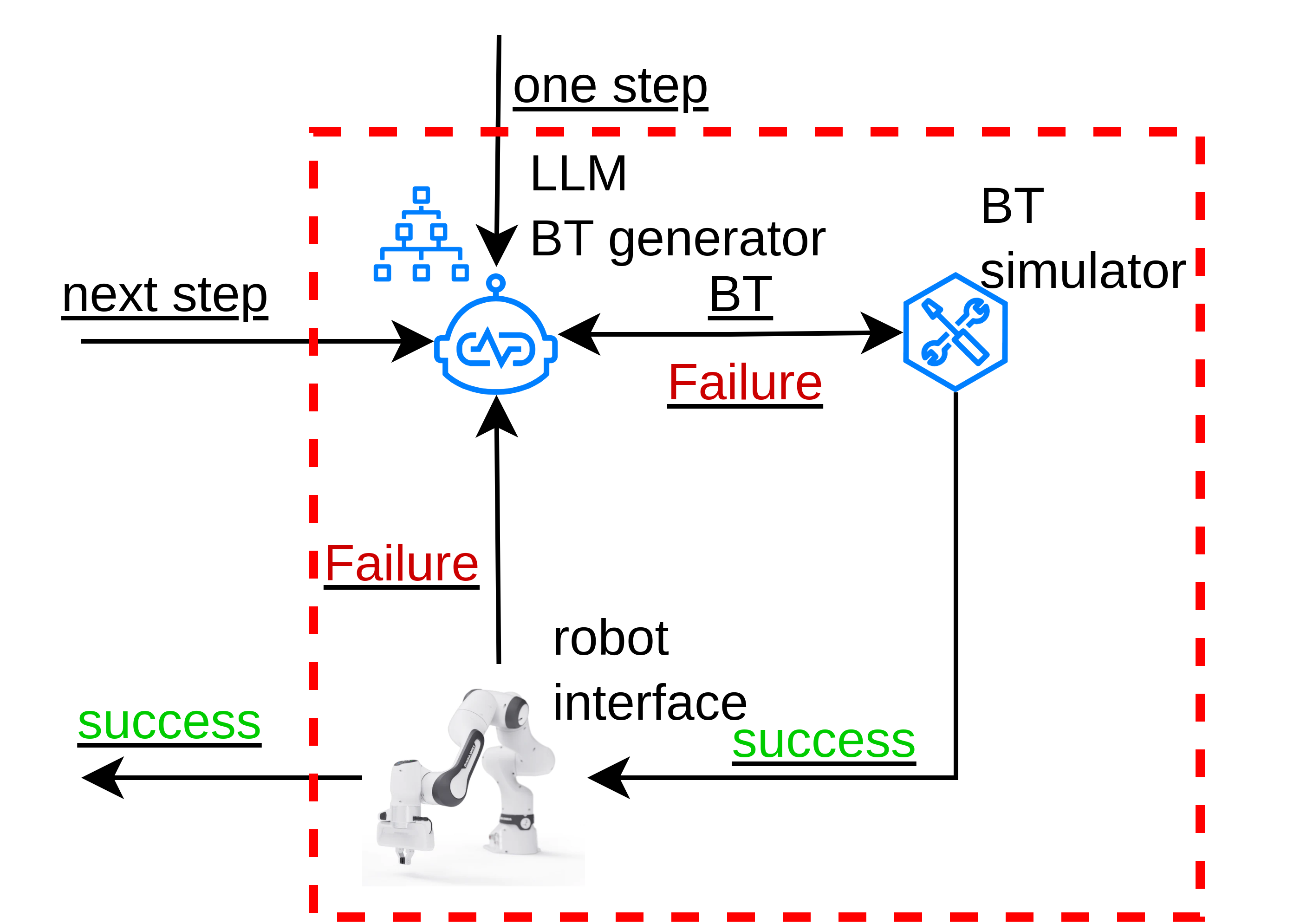
技术框架:该框架包含以下主要模块:1) 指令解析模块:将人类输入的自然语言指令解析为机器人可理解的动作序列。2) BT生成模块:利用LLM将动作序列转化为行为树结构,该结构定义了机器人的行为逻辑。3) 反馈集成模块:接收人类在机器人执行过程中的反馈,并利用LLM调整BT,以优化任务执行。4) 机器人控制模块:将生成的BT转化为机器人控制指令,驱动机器人执行任务。
关键创新:该框架的关键创新在于将LLM应用于BT的完全生成,并将其与人类反馈相结合,实现了人机协作的动态任务规划。与传统的基于规则或优化的BT生成方法不同,该框架能够更好地理解人类意图,并根据实时反馈进行调整,从而提高了任务的成功率和效率。此外,该框架还考虑了工具使用的细粒度知识,使得机器人能够更灵活地完成各种操作任务。
关键设计:框架中LLM的选择和训练至关重要。需要选择具有较强自然语言理解和生成能力的LLM,并使用包含机器人操作任务和人类反馈的数据集进行训练。此外,BT的结构设计也需要仔细考虑,以确保其能够有效地表达机器人的行为逻辑,并易于根据人类反馈进行调整。具体的参数设置和损失函数等技术细节在论文中未明确说明,属于未知内容。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该框架在真实的机器人装配任务中取得了良好的效果。通过与基线方法进行比较,该框架在成功率、逻辑连贯性和可执行性等方面均有显著提升。具体的性能数据和提升幅度在摘要中未明确给出,属于未知内容。该框架能够有效地利用人类指令和反馈,生成可在真实测试平台上执行的行为树。
🎯 应用场景
该研究成果可应用于柔性制造、智能家居、医疗机器人等领域。通过人机协作,机器人能够更好地适应动态变化的任务需求,提高生产效率和服务质量。未来,该技术有望实现更高级别的自主机器人,从而在更广泛的领域发挥作用。
📄 摘要(原文)
In this work, we propose an LLM-based BT generation framework to leverage the strengths of both for sequential manipulation planning. To enable human-robot collaborative task planning and enhance intuitive robot programming by nonexperts, the framework takes human instructions to initiate the generation of action sequences and human feedback to refine BT generation in runtime. All presented methods within the framework are tested on a real robotic assembly example, which uses a gear set model from the Siemens Robot Assembly Challenge. We use a single manipulator with a tool-changing mechanism, a common practice in flexible manufacturing, to facilitate robust grasping of a large variety of objects. Experimental results are evaluated regarding success rate, logical coherence, executability, time consumption, and token consumption. To our knowledge, this is the first human-guided LLM-based BT generation framework that unifies various plausible ways of using LLMs to fully generate BTs that are executable on the real testbed and take into account granular knowledge of tool use.