IMMERTWIN: A Mixed Reality Framework for Enhanced Robotic Arm Teleoperation
作者: Florent P. Audonnet, Ixchel G. Ramirez-Alpizar, Gerardo Aragon-Camarasa
分类: cs.RO, cs.HC
发布日期: 2024-09-13
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出IMMERTWIN混合现实框架,增强机器人手臂遥操作性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 混合现实 机器人遥操作 数字孪生 人机交互 闭环控制
📋 核心要点
- 现有机器人遥操作方法存在交互性不足的挑战,难以提供沉浸式和直观的控制体验。
- IMMERTWIN利用混合现实和数字孪生技术,构建闭环反馈系统,提升用户遥操作的效率和精度。
- 实验表明,用户使用IMMERTWIN能更高效地完成任务,且精神负荷低于以往的TELESIM系统。
📝 摘要(中文)
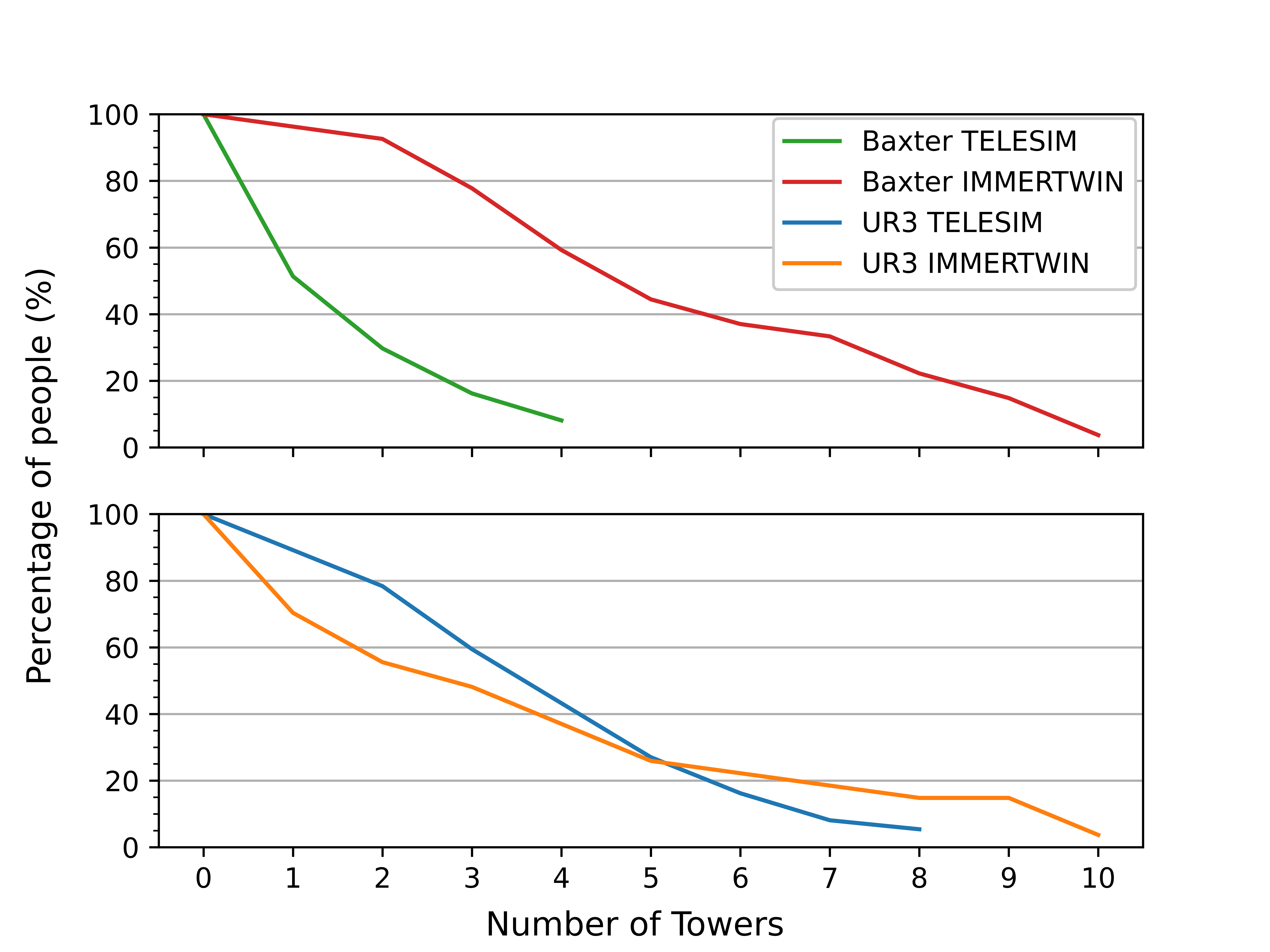
本文提出了一种名为IMMERTWIN的混合现实框架,用于增强机器人手臂的遥操作性能。该框架利用闭环数字孪生作为用户与机器人系统之间交互的桥梁。我们通过一项中等规模的用户调查对IMMERTWIN进行了评估,共有26名参与者在两个机器人上进行了测试。用户需要在虚拟环境中遥操作机器人,将3个立方体堆叠成塔,并在10分钟内尽可能多地重复此任务,事先仅有5分钟的培训。实验结果表明,大多数用户都成功地构建了至少一个由3个立方体组成的塔,最高记录为10个塔(每分钟1个塔),与使用的机器人无关。此外,用户更喜欢使用IMMERTWIN,而不是我们之前的工作TELESIM,因为它降低了他们的精神负荷。项目网站和源代码可在以下网址找到:https://cvas-ug.github.io/immertwin
🔬 方法详解
问题定义:论文旨在解决机器人手臂遥操作中,用户难以获得直观、高效控制的问题。现有方法通常依赖于传统的界面或简单的虚拟环境,缺乏沉浸感和实时反馈,导致操作精度低、学习曲线陡峭,且用户精神负荷较高。
核心思路:论文的核心思路是利用混合现实技术,构建一个闭环的数字孪生系统。用户在混合现实环境中与机器人的虚拟副本进行交互,同时接收来自真实机器人的实时反馈。这种方式能够提供更直观的操作体验,降低用户的认知负担,并提高操作的精度和效率。
技术框架:IMMERTWIN框架包含以下主要模块:1) 机器人模型:创建真实机器人的精确数字孪生模型。2) 混合现实界面:提供用户交互的虚拟环境,允许用户通过手势或控制器操作虚拟机器人。3) 闭环控制:将用户的操作指令传递给真实机器人,并实时将真实机器人的状态反馈到虚拟环境中,形成闭环控制。4) 状态同步:确保虚拟机器人和真实机器人的状态保持同步,提供准确的视觉和触觉反馈。
关键创新:该方法的关键创新在于将混合现实技术与闭环数字孪生相结合,为机器人遥操作提供了一种全新的交互方式。与传统的遥操作方法相比,IMMERTWIN能够提供更直观、沉浸式的操作体验,降低用户的认知负担,并提高操作的精度和效率。
关键设计:具体的技术细节包括:精确的机器人模型构建方法,低延迟的状态同步算法,以及针对混合现实环境优化的用户界面设计。论文中可能还涉及了特定的手势识别算法或控制器映射方案,以实现更自然的操作体验。损失函数和网络结构等细节未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,使用IMMERTWIN的用户能够成功构建至少一个由3个立方体组成的塔,最高记录为10个塔(每分钟1个塔),且与使用的机器人无关。更重要的是,用户反馈表明,与之前的TELESIM系统相比,IMMERTWIN显著降低了用户的精神负荷,表明其在提升用户体验方面具有显著优势。具体的量化指标(如任务完成时间、错误率等)未知。
🎯 应用场景
IMMERTWIN框架可应用于多种场景,如远程医疗、危险环境下的机器人操作、工业自动化等。例如,医生可以通过该系统远程操控机器人进行手术,工人可以在安全距离外操作机器人处理有害物质,工程师可以远程维护和调试复杂的设备。该研究有望提升机器人遥操作的效率和安全性,拓展机器人的应用范围。
📄 摘要(原文)
We present IMMERTWIN, a mixed reality framework for enhance robotic arm teleoperation using a closed-loop digital twin as a bridge for interaction between the user and the robotic system. We evaluated IMMERTWIN by performing a medium-scale user survey with 26 participants on two robots. Users were asked to teleoperate with both robots inside the virtual environment to pick and place 3 cubes in a tower and to repeat this task as many times as possible in 10 minutes, with only 5 minutes of training beforehand. Our experimental results show that most users were able to succeed by building at least a tower of 3 cubes regardless of the robot used and a maximum of 10 towers (1 tower per minute). In addition, users preferred to use IMMERTWIN over our previous work, TELESIM, as it caused them less mental workload. The project website and source code can be found at: https://cvas-ug.github.io/immertwin