A Space-Efficient Algebraic Approach to Robotic Motion Planning
作者: Matthias Bentert, Daniel Coimbra Salomao, Alex Crane, Yosuke Mizutani, Felix Reidl, Blair D. Sullivan
分类: cs.RO, cs.DS
发布日期: 2024-09-12 (更新: 2025-02-19)
💡 一句话要点
提出一种空间高效的代数方法用于机器人运动规划,解决图遍历问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人运动规划 图遍历 代数方法 单项式测试 算术电路
📋 核心要点
- 现有图遍历算法空间复杂度高,限制了其在实际机器人应用中的应用。
- 利用代数工具,特别是算术电路中的单项式测试,实现内存高效的路径规划。
- 通过实验验证,基于电路的算法在内存效率方面表现良好,为进一步工程化提供了支持。
📝 摘要(中文)
本文研究了机器人高效路径规划问题,应用于基础设施检测和自动化手术成像等场景。这些任务可以建模为组合优化问题——图遍历。现有算法受限于指数级的空间复杂度,在实践中表现不佳。本文提出了一种基于代数工具的内存高效方法,该方法与算术电路中多项式的单项式测试相关。我们的贡献有两方面:首先,我们使用一种称为树证书的新方法,修复了现有单项式检测工作中的一个缺陷。其次,我们证明,除了检测之外,这些工具还允许我们从电路中有效地恢复感兴趣的单项式,为相关代数工具的更广泛应用打开了大门。对于图遍历问题,我们设计并评估了一个完整的代数流程。我们的工程实现表明,基于电路的算法在实践中确实具有内存效率,从而鼓励进一步的工程努力。
🔬 方法详解
问题定义:论文旨在解决机器人运动规划中的图遍历问题,特别是在基础设施检测和自动化手术成像等应用中。现有算法的主要痛点在于其指数级的空间复杂度,导致在实际应用中难以处理大规模图数据。
核心思路:论文的核心思路是利用代数方法,将图遍历问题转化为算术电路中的单项式测试问题。通过高效地检测和恢复电路中的单项式,可以避免传统方法中需要存储大量中间状态的问题,从而降低空间复杂度。
技术框架:整体流程包括以下几个阶段:1) 将图遍历问题建模为算术电路;2) 使用改进的单项式检测算法(基于树证书)来判断是否存在满足条件的路径;3) 如果存在,则利用代数工具恢复对应的单项式,从而得到具体的路径。
关键创新:论文的关键创新在于:1) 修复了现有单项式检测算法中的缺陷,提出了一种新的基于树证书的方法,提高了检测的准确性;2) 证明了代数工具不仅可以用于单项式检测,还可以用于单项式的恢复,从而扩展了其应用范围。
关键设计:论文的关键设计包括:1) 算术电路的构建方式,需要保证电路的规模与图的大小呈多项式关系;2) 树证书的具体构造方法,需要保证证书的有效性和高效性;3) 单项式恢复算法的设计,需要保证能够快速地从电路中提取出对应的路径信息。
🖼️ 关键图片
📊 实验亮点
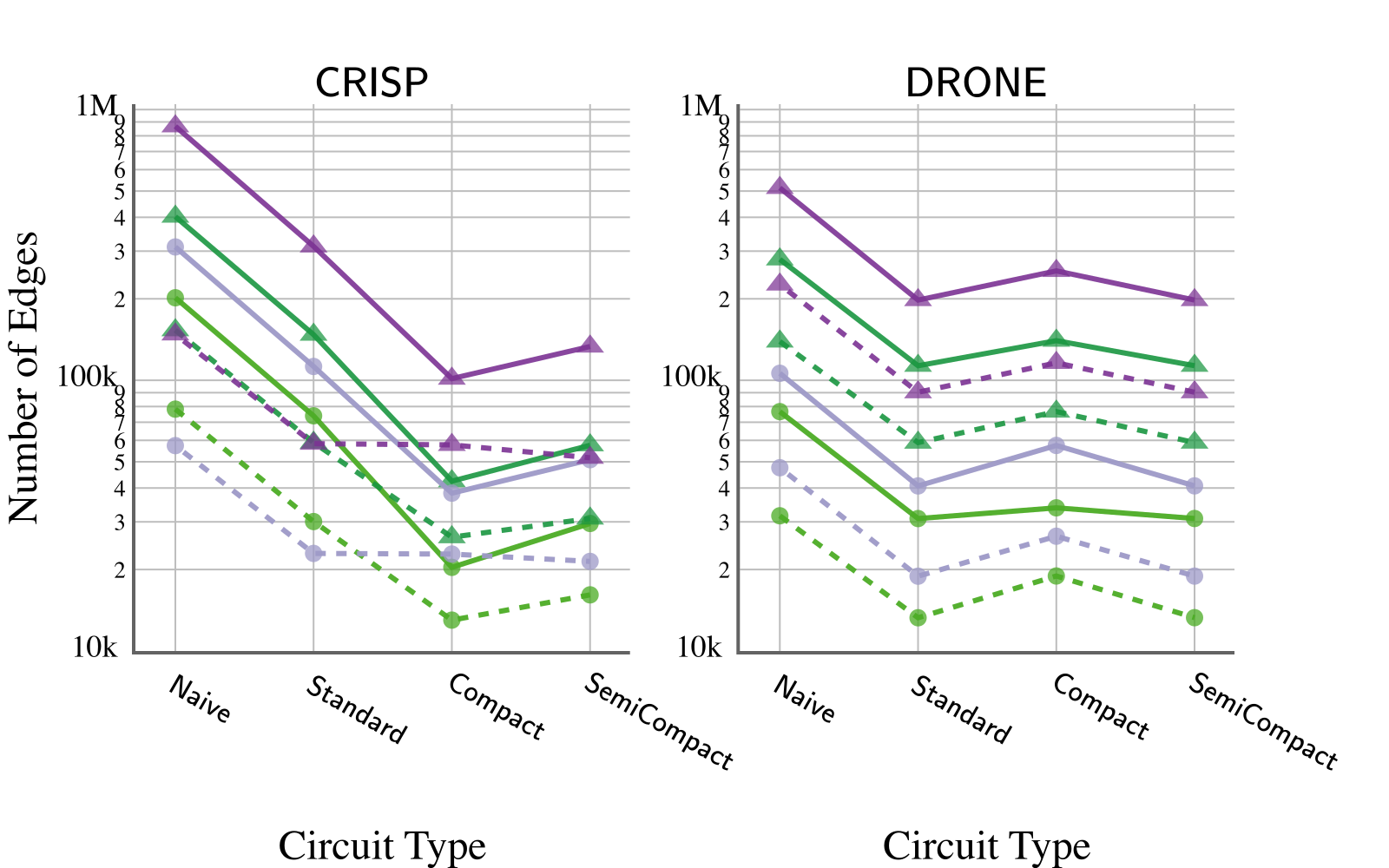
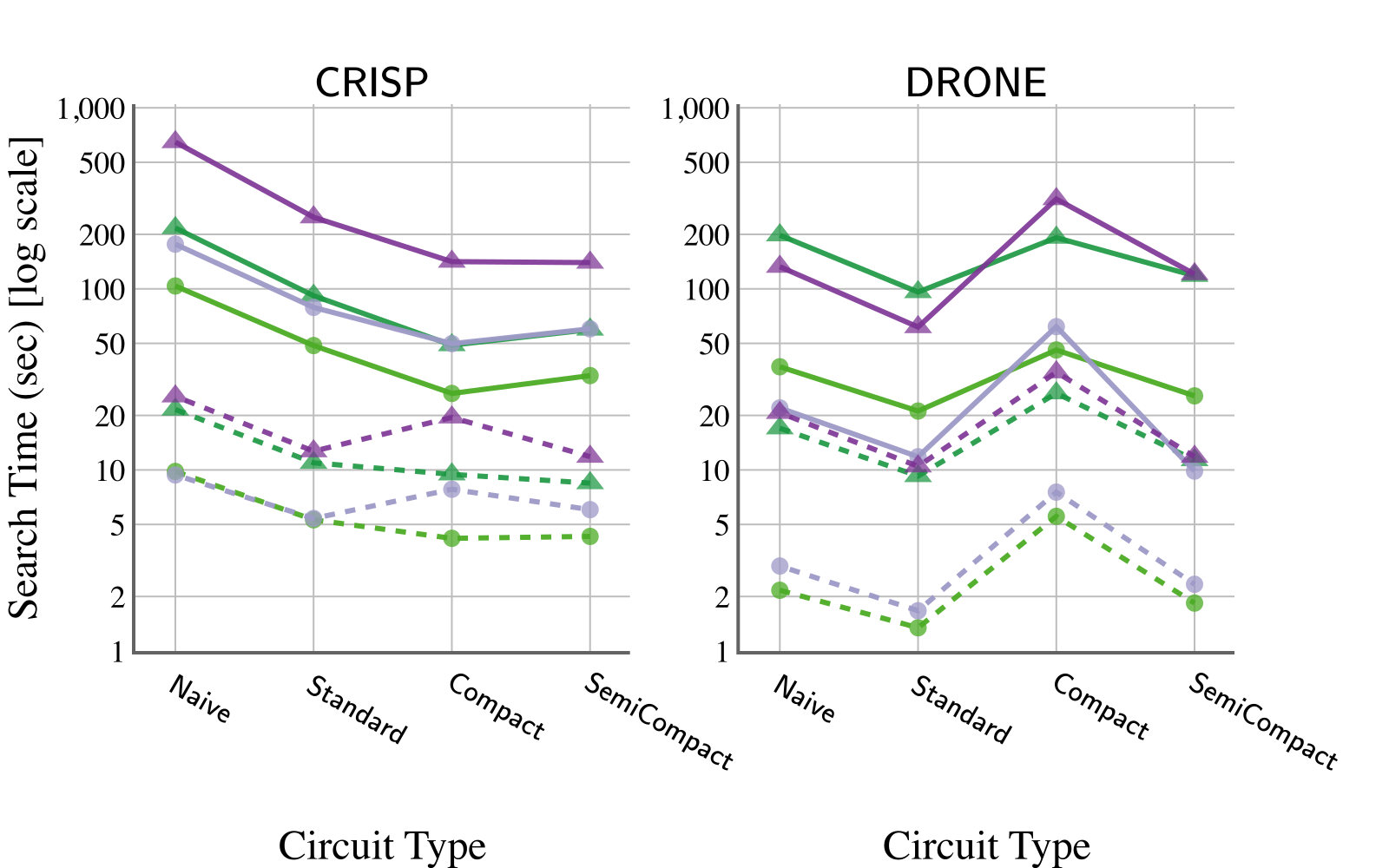
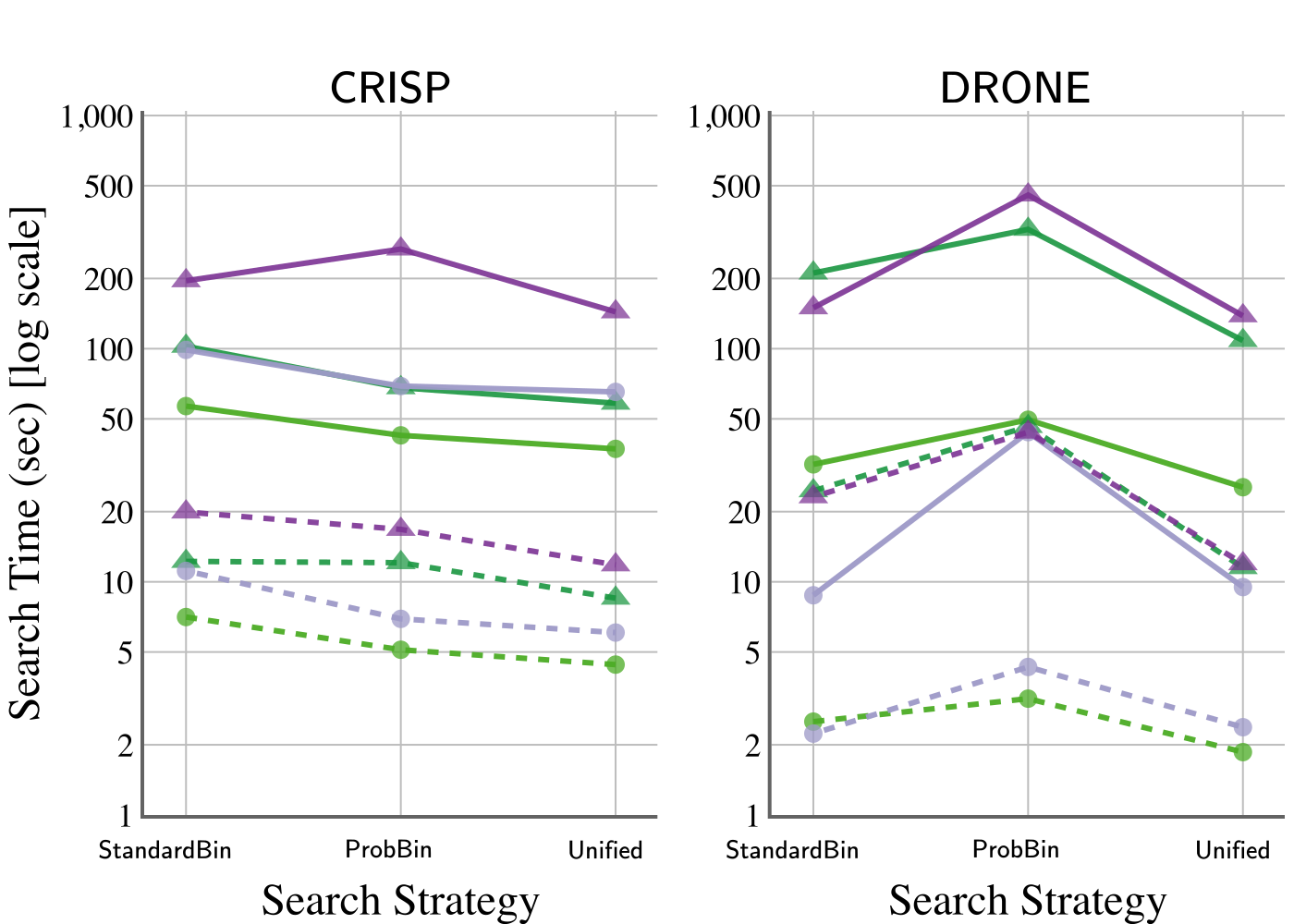
论文通过工程实现验证了所提出的代数方法的有效性。实验结果表明,基于电路的算法在实践中具有显著的内存效率优势,能够处理更大规模的图数据。虽然论文中没有给出具体的性能数据和对比基线,但强调了该方法在内存效率方面的潜力,并鼓励进一步的工程优化。
🎯 应用场景
该研究成果可应用于多种机器人运动规划场景,例如基础设施检测(桥梁、管道等)、自动化手术成像、以及其他需要在复杂环境中进行路径规划的任务。通过降低算法的空间复杂度,可以使机器人能够在资源受限的平台上运行,并处理更大规模的环境地图,从而提高机器人的自主性和适应性。未来的研究可以进一步探索该方法在其他组合优化问题中的应用。
📄 摘要(原文)
We consider efficient route planning for robots in applications such as infrastructure inspection and automated surgical imaging. These tasks can be modeled via the combinatorial problem Graph Inspection. The best known algorithms for this problem are limited in practice by exponential space complexity. In this paper, we develop a memory-efficient approach using algebraic tools related to monomial testing on the polynomials associated with certain arithmetic circuits. Our contributions are two-fold. We first repair a minor flaw in existing work on monomial detection using a new approach we call tree certificates. We further show that, in addition to detection, these tools allow us to efficiently recover monomials of interest from circuits, opening the door for significantly broadened application of related algebraic tools. For Graph Inspection, we design and evaluate a complete algebraic pipeline. Our engineered implementation demonstrates that circuit-based algorithms are indeed memory-efficient in practice, thus encouraging further engineering efforts.