An Open-Source Soft Robotic Platform for Autonomous Aerial Manipulation in the Wild
作者: Erik Bauer, Marc Blöchlinger, Pascal Strauch, Arman Raayatsanati, Curdin Cavelti, Robert K. Katzschmann
分类: cs.RO, eess.SY
发布日期: 2024-09-11 (更新: 2025-12-08)
备注: Project website: https://sites.google.com/view/open-source-soft-platform/open-source-soft-robotic-platform GitHub: https://github.com/raptor-ethz
期刊: Proceedings of Machine Learning Research (2025) 3094-3106
💡 一句话要点
提出一种开源的软体机器人平台,用于野外自主空中操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 空中操作 自主导航 软体机器人 板载感知 ROS 2 开源平台 目标抓取
📋 核心要点
- 现有空中操作平台依赖外部感知系统,成本高昂且限制了应用场景,难以在真实环境中部署。
- 该论文提出一种完全基于板载感知系统的自主空中操作平台,无需外部辅助即可完成任务。
- 实验结果表明,该平台能够在各种室内和室外环境中自主抓取物体,提升了空中操作的实用性。
📝 摘要(中文)
本文介绍了一种用于自主空中操作的新型平台,该平台完全利用板载感知系统。空中操作结合了飞行平台的多功能性和速度与移动操作的功能能力,由于需要精确定位和控制,因此带来了重大挑战。传统上,研究人员依赖于离线感知系统,这些系统仅限于昂贵且不切实际的特殊装备的室内环境。该平台无需依赖外部感知系统,即可在各种室内和室外环境中执行空中操作。实验结果表明,该平台能够在各种环境中自主抓取各种物体。通过消除对昂贵跟踪解决方案的需求,这一进步显著提高了空中操作应用的可扩展性和实用性。为了加速未来的研究,我们开源了我们的 ROS 2 软件栈和定制硬件设计,使我们的贡献能够为更广泛的研究社区所用。
🔬 方法详解
问题定义:现有空中操作平台依赖于外部感知系统(如运动捕捉系统),这限制了它们在受控实验室环境之外的部署。在野外或非结构化环境中进行空中操作,需要解决自主定位、目标检测与抓取等问题,而现有方法难以兼顾成本、精度和鲁棒性。
核心思路:该论文的核心思路是设计一个完全依赖板载传感器和计算资源的自主空中操作平台。通过优化硬件设计和软件算法,实现高精度、低延迟的感知和控制,从而摆脱对外部基础设施的依赖。软体机器人的引入增加了操作的灵活性和安全性。
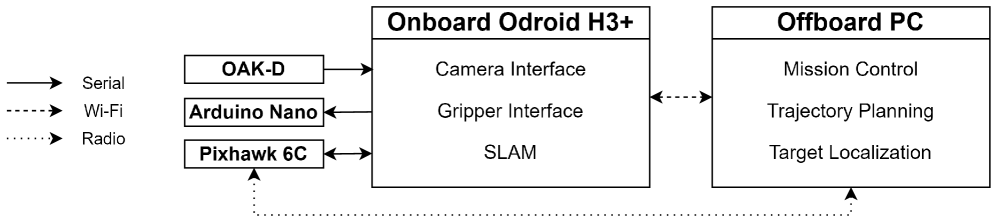
技术框架:该平台由以下几个主要模块组成:1) 感知模块:利用板载摄像头和深度传感器进行环境感知和目标检测;2) 定位模块:采用视觉里程计或SLAM算法进行自主定位;3) 控制模块:基于模型或学习的方法控制飞行器和软体机械臂的运动;4) 软体机械臂:设计用于抓取不同形状和大小的物体。整个系统基于ROS 2框架开发,方便集成和扩展。
关键创新:该论文的关键创新在于:1) 完全自主的空中操作:无需外部感知系统,即可在复杂环境中完成抓取任务;2) 软体机械臂的应用:提高了抓取的适应性和安全性;3) 开源的软硬件平台:促进了该领域的研究和发展。
关键设计:硬件方面,选择了轻量化、高推重比的飞行器和定制的软体机械臂。软件方面,采用了基于深度学习的目标检测算法和基于模型的控制方法。具体参数设置和网络结构在论文中未详细说明,属于未知信息。
🖼️ 关键图片


📊 实验亮点
该平台能够在各种室内和室外环境中自主抓取各种物体,无需依赖外部感知系统。虽然论文中没有给出具体的性能指标(如抓取成功率、定位精度等),但实验结果表明该平台具有良好的鲁棒性和适应性。开源的软硬件设计也为其他研究者提供了便利,加速了该领域的发展。
🎯 应用场景
该研究成果可应用于多种场景,例如:灾后救援,在危险或难以到达的区域进行物资输送和目标搜索;农业领域,进行农作物监测和精准喷洒;建筑行业,进行高空检测和维护。该平台具有很高的灵活性和适应性,有望在未来的自动化和智能化领域发挥重要作用。
📄 摘要(原文)
Aerial manipulation combines the versatility and speed of flying platforms with the functional capabilities of mobile manipulation, which presents significant challenges due to the need for precise localization and control. Traditionally, researchers have relied on offboard perception systems, which are limited to expensive and impractical specially equipped indoor environments. In this work, we introduce a novel platform for autonomous aerial manipulation that exclusively utilizes onboard perception systems. Our platform can perform aerial manipulation in various indoor and outdoor environments without depending on external perception systems. Our experimental results demonstrate the platform's ability to autonomously grasp various objects in diverse settings. This advancement significantly improves the scalability and practicality of aerial manipulation applications by eliminating the need for costly tracking solutions. To accelerate future research, we open source our ROS 2 software stack and custom hardware design, making our contributions accessible to the broader research community.