MPPI-Generic: A CUDA Library for Stochastic Trajectory Optimization
作者: Bogdan Vlahov, Jason Gibson, Manan Gandhi, Evangelos A. Theodorou
分类: cs.MS, cs.DC, cs.RO, eess.SY
发布日期: 2024-09-11 (更新: 2025-08-13)
备注: Added missing Acknowledgements section
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
MPPI-Generic:用于随机轨迹优化的CUDA加速通用库
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 路径积分控制 GPU加速 CUDA 机器人控制
📋 核心要点
- 现有MPPI实现通常与特定动力学模型和代价函数紧密耦合,缺乏通用性和可扩展性。
- MPPI-Generic库通过提供清晰的API,解耦了MPPI算法与动力学模型和代价函数,实现了高度的模块化和可定制性。
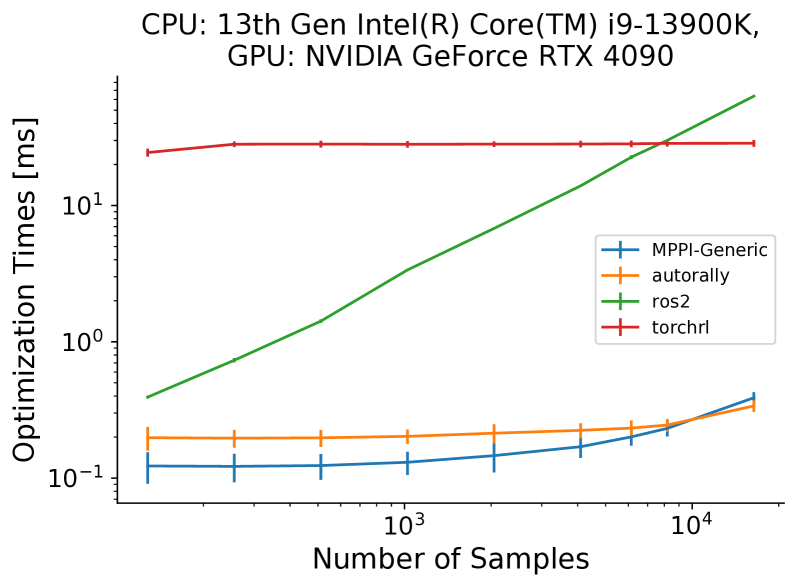
- 实验表明,MPPI-Generic库在多种GPU上实现了优异的计算性能,具备实时控制能力,优于其他流行的MPPI实现。
📝 摘要(中文)
本文介绍了一个新的C++/CUDA库,名为MPPI-Generic,用于GPU加速的随机优化。它提供了模型预测路径积分控制(Model Predictive Path Integral control, MPPI)、管状模型预测路径积分控制(Tube-Model Predictive Path Integral Control)和鲁棒模型预测路径积分控制(Robust Model Predictive Path Integral Control)的实现。该库允许这些算法应用于许多现有的动力学模型和代价函数。此外,研究人员可以遵循我们的API定义创建自己的动力学模型或代价函数,而无需更改实际的模型预测路径积分控制代码。最后,我们将计算性能与各种GPU上其他流行的模型预测路径积分控制实现进行了比较,以展示我们的库所能实现的实时能力。库代码可在https://acdslab.github.io/mppi-generic-website/ 找到。
🔬 方法详解
问题定义:现有的模型预测路径积分控制(MPPI)实现通常是针对特定任务和环境定制的,与特定的动力学模型和代价函数紧密耦合。这使得代码难以重用和扩展,当需要应用于新的场景或使用不同的模型时,需要进行大量的修改和重新实现。此外,缺乏统一的接口和高效的GPU加速实现也限制了MPPI在实时控制领域的应用。
核心思路:MPPI-Generic的核心思路是将MPPI算法与动力学模型和代价函数解耦。通过定义清晰的API,允许用户自定义动力学模型和代价函数,而无需修改MPPI算法的核心代码。这种模块化的设计提高了代码的通用性和可扩展性,使得MPPI可以方便地应用于各种不同的控制任务。
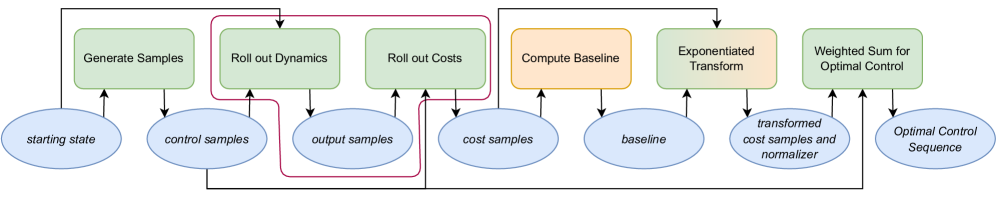
技术框架:MPPI-Generic库的整体架构包括以下几个主要模块:1) MPPI算法核心模块,负责执行MPPI算法的迭代过程;2) 动力学模型接口,定义了动力学模型的输入和输出,用户可以根据自己的需求实现不同的动力学模型;3) 代价函数接口,定义了代价函数的输入和输出,用户可以根据自己的需求实现不同的代价函数;4) CUDA加速模块,利用GPU的并行计算能力加速MPPI算法的计算过程。整个流程为:用户定义动力学模型和代价函数,MPPI算法核心模块调用这些模型和函数进行轨迹优化,CUDA加速模块负责加速计算。
关键创新:MPPI-Generic最重要的技术创新点在于其通用性和可扩展性。通过解耦MPPI算法与动力学模型和代价函数,使得该库可以应用于各种不同的控制任务。与现有方法的本质区别在于,MPPI-Generic提供了一个通用的框架,用户可以根据自己的需求定制动力学模型和代价函数,而无需修改MPPI算法的核心代码。此外,该库还提供了高效的GPU加速实现,使得MPPI可以应用于实时控制领域。
关键设计:MPPI-Generic的关键设计包括:1) 定义清晰的API,使得用户可以方便地自定义动力学模型和代价函数;2) 使用CUDA进行GPU加速,提高计算效率;3) 提供多种MPPI变体,包括MPPI、Tube-MPPI和Robust-MPPI,以满足不同的控制需求;4) 提供详细的文档和示例代码,方便用户使用和学习。
🖼️ 关键图片

📊 实验亮点
实验结果表明,MPPI-Generic库在多种GPU上实现了优异的计算性能,能够满足实时控制的需求。与其他的MPPI实现相比,MPPI-Generic在计算速度上具有显著优势。具体性能数据可在论文提供的链接中找到。
🎯 应用场景
该研究成果可广泛应用于机器人控制、自动驾驶、无人机控制等领域。通过MPPI-Generic库,研究人员和工程师可以快速构建和部署基于MPPI的控制系统,解决各种复杂的控制问题。该库的实时性能使得其在需要快速响应的应用场景中具有重要价值,例如高速运动控制和避障。
📄 摘要(原文)
This paper introduces a new C++/CUDA library for GPU-accelerated stochastic optimization called MPPI-Generic. It provides implementations of Model Predictive Path Integral control, Tube-Model Predictive Path Integral Control, and Robust Model Predictive Path Integral Control, and allows for these algorithms to be used across many pre-existing dynamics models and cost functions. Furthermore, researchers can create their own dynamics models or cost functions following our API definitions without needing to change the actual Model Predictive Path Integral Control code. Finally, we compare computational performance to other popular implementations of Model Predictive Path Integral Control over a variety of GPUs to show the real-time capabilities our library can allow for. Library code can be found at: https://acdslab.github.io/mppi-generic-website/ .