End-to-End and Highly-Efficient Differentiable Simulation for Robotics
作者: Quentin Le Lidec, Louis Montaut, Yann de Mont-Marin, Fabian Schramm, Justin Carpentier
分类: cs.RO
发布日期: 2024-09-11 (更新: 2025-05-20)
💡 一句话要点
提出高效可微机器人仿真方法,加速强化学习和轨迹优化收敛。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱八:物理动画 (Physics-based Animation)
关键词: 机器人仿真 可微仿真 强化学习 轨迹优化 碰撞检测 摩擦力 解析导数
📋 核心要点
- 机器人仿真器在效率和可扩展性方面取得了显著进展,但高效准确地计算仿真导数仍然是一个挑战。
- 该论文提出了一种统一的算法解决方案,用于计算机器人仿真器的解析导数,考虑了碰撞和摩擦的非光滑性。
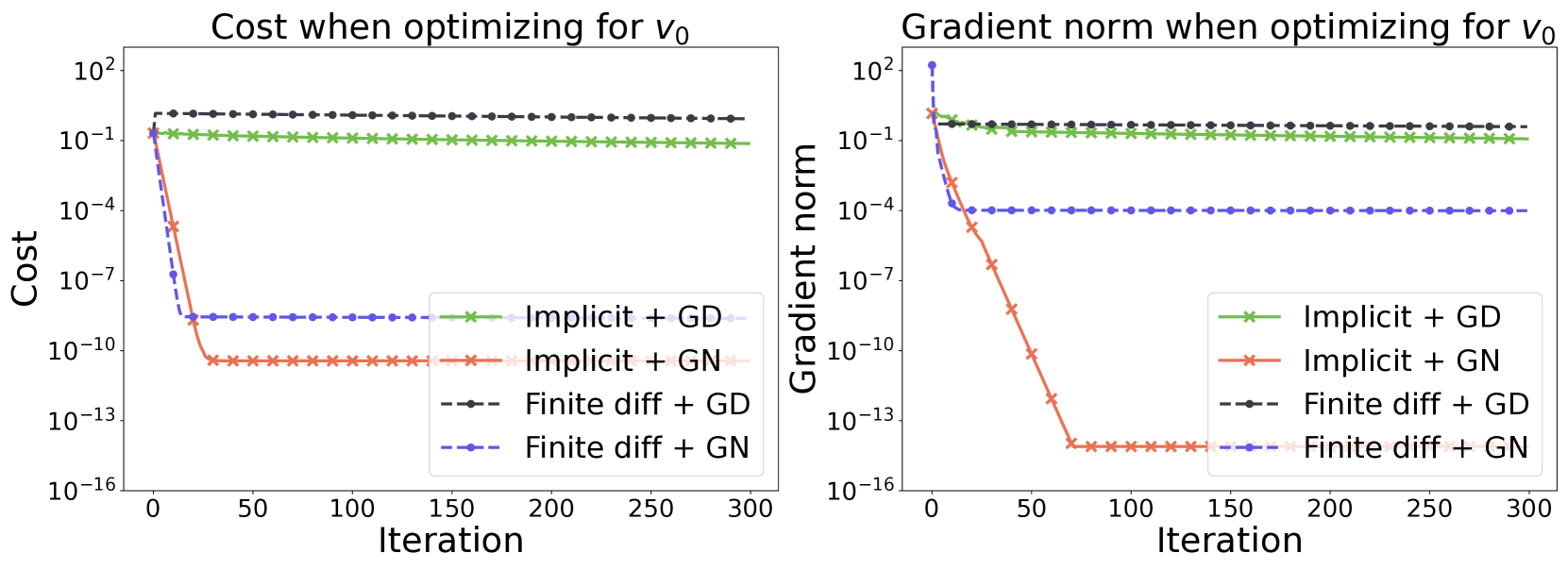
- 实验结果表明,该方法在计算效率上优于现有方案至少100倍,有望显著加速强化学习和轨迹优化算法的收敛速度。
📝 摘要(中文)
本文提出了一种统一且高效的算法解决方案,用于计算机器人仿真器的解析导数。该方法同时考虑了碰撞和摩擦阶段,处理了它们内在的非光滑性,并利用了底层多体系统所带来的稀疏性。这些导数已在C++中实现,代码将在Simple模拟器中开源。实验结果表明,对于7自由度机械臂,计算时间仅为5微秒,对于36自由度人形机器人,计算时间为95微秒,性能优于其他解决方案至少100倍。
🔬 方法详解
问题定义:现有机器人仿真器在计算导数时效率低下,这限制了强化学习和轨迹优化算法的收敛速度,尤其是在涉及物理接触交互的问题中。现有的方法难以兼顾效率和精度,并且难以处理碰撞和摩擦等非光滑现象。
核心思路:该论文的核心思路是提出一种统一的算法,能够高效地计算机器人仿真器的解析导数,同时考虑碰撞和摩擦等非光滑因素,并利用多体系统的稀疏性来提高计算效率。通过解析计算导数,避免了数值微分带来的误差和计算开销。
技术框架:该方法主要包含以下几个阶段:1) 运动学建模:建立机器人系统的运动学模型,包括关节角度、连杆长度等参数。2) 动力学建模:建立机器人系统的动力学模型,包括质量、惯量、力矩等参数。3) 碰撞检测:检测机器人系统与环境之间的碰撞。4) 摩擦力计算:计算机器人系统与环境之间的摩擦力。5) 导数计算:计算机器人系统状态对控制输入的导数。整个框架基于C++实现,并将在Simple模拟器中开源。
关键创新:该方法最重要的创新在于提出了一种统一的算法,能够同时处理碰撞和摩擦等非光滑现象,并利用多体系统的稀疏性来提高计算效率。与现有方法相比,该方法能够更高效、更准确地计算仿真导数。
关键设计:该方法的关键设计包括:1) 使用解析方法计算导数,避免了数值微分的误差。2) 考虑了碰撞和摩擦等非光滑现象,提高了仿真的真实性。3) 利用多体系统的稀疏性,减少了计算量。4) 使用C++实现,提高了计算效率。具体的参数设置和损失函数等技术细节在论文中没有详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在计算效率上显著优于现有方案。对于7自由度机械臂,计算时间仅为5微秒;对于36自由度人形机器人,计算时间为95微秒。与现有方法相比,该方法的计算速度提高了至少100倍。这些结果表明,该方法具有很高的实用价值。
🎯 应用场景
该研究成果可广泛应用于机器人强化学习、轨迹优化、控制算法设计等领域。通过高效计算仿真导数,可以加速强化学习算法的训练过程,提高轨迹优化算法的收敛速度,并为机器人控制算法的设计提供更准确的依据。该方法有望推动机器人技术在工业自动化、医疗康复、服务机器人等领域的应用。
📄 摘要(原文)
Over the past few years, robotics simulators have largely improved in efficiency and scalability, enabling them to generate years of simulated data in a few hours. Yet, efficiently and accurately computing the simulation derivatives remains an open challenge, with potentially high gains on the convergence speed of reinforcement learning and trajectory optimization algorithms, especially for problems involving physical contact interactions. This paper contributes to this objective by introducing a unified and efficient algorithmic solution for computing the analytical derivatives of robotic simulators. The approach considers both the collision and frictional stages, accounting for their intrinsic nonsmoothness and also exploiting the sparsity induced by the underlying multibody systems. These derivatives have been implemented in C++, and the code will be open-sourced in the Simple simulator. They depict state-of-the-art timings ranging from 5 microseconds for a 7-dof manipulator up to 95 microseconds for 36-dof humanoid, outperforming alternative solutions by a factor of at least 100.