SIS: Seam-Informed Strategy for T-shirt Unfolding
作者: Xuzhao Huang, Akira Seino, Fuyuki Tokuda, Akinari Kobayashi, Dayuan Chen, Yasuhisa Hirata, Norman C. Tien, Kazuhiro Kosuge
分类: cs.RO
发布日期: 2024-09-11 (更新: 2025-06-09)
备注: 8 pages, 8 figures. To be published in IEEE Robotics and Automation Letters (RAL)
🔗 代码/项目: GITHUB
💡 一句话要点
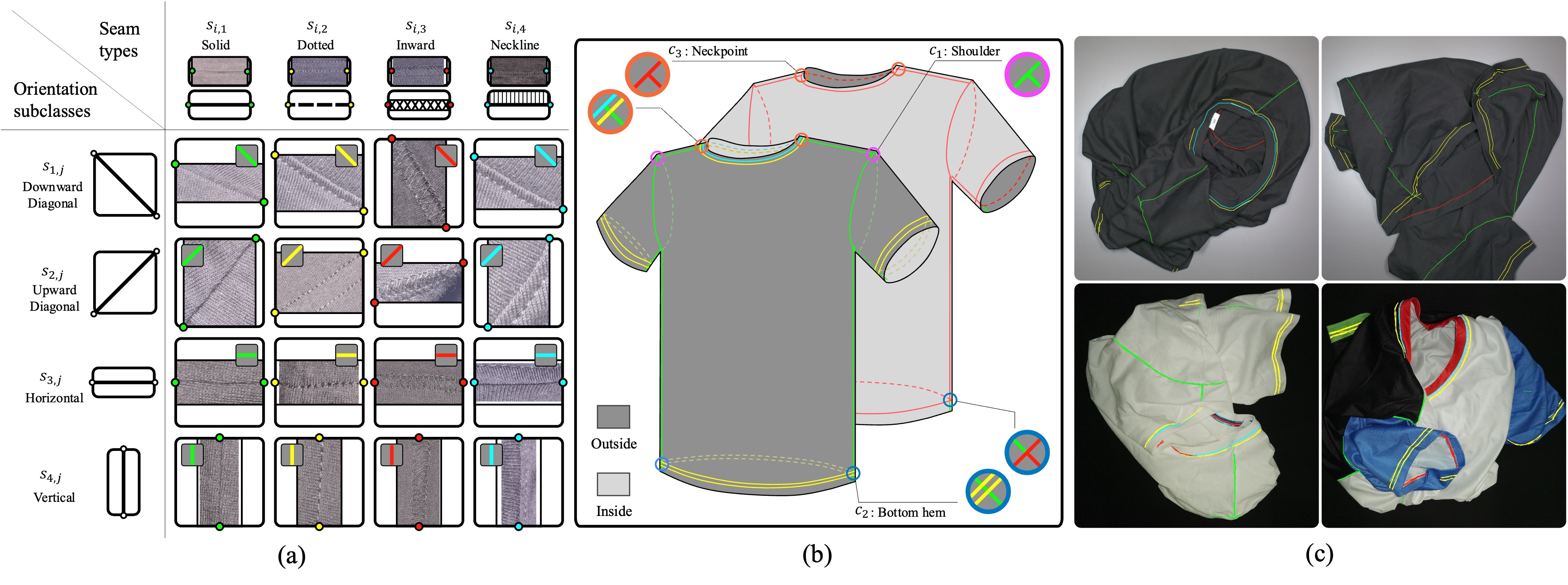
提出基于缝线的策略,用于T恤的抓取与展开
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 服装处理 机器人抓取 缝线特征 决策矩阵 自主学习
📋 核心要点
- 现有服装处理方法缺乏对服装结构信息的有效利用,难以准确抓取和展开。
- 论文提出一种基于缝线的策略,利用缝线特征提取和决策矩阵迭代,指导机器人抓取和展开T恤。
- 实验结果表明,该策略在真实场景下有效,无需仿真训练,提升了机器人服装处理性能。
📝 摘要(中文)
本文提出了一种新的基于缝线的策略(SIS),用于寻找处理服装(如T恤)的动作,例如抓取和展开。该策略利用服装上富含信息的缝线,通过提出的缝线特征提取方法(SFEM)提取双臂机械臂系统的抓取点候选。然后,通过提出的决策矩阵迭代方法(DMIM)选择机器人系统的抓取点对。决策矩阵首先通过多个人工演示计算得到,并通过机器人执行结果进行更新,以提高机器人的抓取和展开性能。值得注意的是,该方案是在真实数据上训练的,不依赖于仿真。实验结果表明了所提出策略的有效性。
🔬 方法详解
问题定义:现有服装处理方法通常依赖于图像识别或力反馈等信息,但忽略了服装本身所蕴含的结构信息,例如缝线的位置和类型。这导致机器人难以准确地确定抓取点,从而影响服装的展开效果。特别是在处理柔软、易变形的T恤等服装时,这一问题尤为突出。
核心思路:论文的核心思路是利用服装上的缝线作为关键特征,指导机器人进行抓取和展开。缝线包含了服装的结构信息,例如袖口、领口等位置,这些信息可以帮助机器人更好地理解服装的形状和结构,从而选择合适的抓取点。通过分析缝线的类型和组合,可以推断出服装的展开方式。
技术框架:该方法主要包含两个阶段:缝线特征提取(SFEM)和决策矩阵迭代(DMIM)。首先,SFEM用于提取服装上的缝线特征,包括缝线的位置、类型和方向等。然后,DMIM利用提取的缝线特征,结合人工演示数据和机器人执行结果,构建一个决策矩阵,用于评估不同抓取点对的优劣。通过迭代更新决策矩阵,机器人可以逐步学习到最佳的抓取策略。
关键创新:该方法最重要的创新点在于将服装的缝线信息融入到机器人抓取和展开的过程中。与传统的基于图像或力反馈的方法相比,该方法能够更好地利用服装的结构信息,从而提高抓取的准确性和展开的效果。此外,该方法采用决策矩阵迭代的方式,能够使机器人通过自主学习不断优化抓取策略。
关键设计:SFEM的具体实现方式未知,但可以推测其可能涉及图像处理、边缘检测等技术。DMIM的关键在于决策矩阵的构建和更新方式。决策矩阵的元素表示不同抓取点对的得分,得分越高表示该抓取点对越适合用于展开服装。决策矩阵的初始值由人工演示数据确定,然后通过机器人执行结果进行更新。具体的更新规则未知,但可以推测其可能涉及强化学习或监督学习等方法。
🖼️ 关键图片


📊 实验亮点
该论文提出的方法在真实场景下进行了实验验证,结果表明该方法能够有效地提高机器人抓取和展开T恤的性能。由于论文中没有提供具体的性能数据和对比基线,因此无法量化提升幅度。但论文强调,该方法无需仿真训练,可以直接在真实数据上进行学习,这大大降低了部署成本。
🎯 应用场景
该研究成果可应用于服装自动化生产、智能仓储、以及家庭服务机器人等领域。例如,在服装生产线上,机器人可以利用该方法自动抓取和展开服装,提高生产效率。在智能仓储中,机器人可以利用该方法对服装进行整理和分类。在家庭服务机器人领域,机器人可以利用该方法帮助人们整理衣物。
📄 摘要(原文)
Seams are information-rich components of garments. The presence of different types of seams and their combinations helps to select grasping points for garment handling. In this paper, we propose a new Seam-Informed Strategy (SIS) for finding actions for handling a garment, such as grasping and unfolding a T-shirt. Candidates for a pair of grasping points for a dual-arm manipulator system are extracted using the proposed Seam Feature Extraction Method (SFEM). A pair of grasping points for the robot system is selected by the proposed Decision Matrix Iteration Method (DMIM). The decision matrix is first computed by multiple human demonstrations and updated by the robot execution results to improve the grasping and unfolding performance of the robot. Note that the proposed scheme is trained on real data without relying on simulation. Experimental results demonstrate the effectiveness of the proposed strategy. The project video is available at https://github.com/lancexz/sis