MAPS: Energy-Reliability Tradeoff Management in Autonomous Vehicles Through LLMs Penetrated Science
作者: Mahdieh Aliazam, Ali Javadi, Amir Mahdi Hosseini Monazzah, Ahmad Akbari Azirani
分类: cs.AR, cs.RO
发布日期: 2024-09-10
💡 一句话要点
提出MAPS:利用LLM提升自动驾驶能耗-可靠性权衡管理
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 自动驾驶 大型语言模型 能耗优化 可靠性 地图理解
📋 核心要点
- 自动驾驶车辆对能耗和可靠性有极高要求,现有方法难以在两者之间取得最佳平衡。
- MAPS方法利用LLM理解地图信息,预测车辆运行参数,从而优化能耗和可靠性的权衡。
- 实验结果表明,MAPS在导航精度、计算单元能耗以及机械和计算单元综合能耗方面均有显著提升。
📝 摘要(中文)
随着自动驾驶汽车日益普及,高精度和高效率的系统对于提高安全性、性能和降低能耗至关重要。有效管理这些系统中的能量-可靠性权衡,需要预测车辆运行过程中的各种条件。大型语言模型(LLM)的显著改进,以及ChatGPT等知名模型的出现,为自动驾驶汽车相关的预测提供了独特的机会。本文提出了MAPS,利用LLM作为地图阅读器协同驾驶员,预测自动驾驶车辆运行期间的关键参数设置,以平衡能量-可靠性权衡。MAPS方法在导航精度方面比最佳基线方法提高了20%。MAPS还在计算单元中节省了11%的能源,在机械和计算单元中节省了高达54%的能源。
🔬 方法详解
问题定义:自动驾驶车辆需要在能耗和可靠性之间进行权衡。例如,为了提高可靠性,可能需要增加计算资源或更频繁地进行状态检查,但这会增加能耗。现有方法通常依赖于预定义的规则或简单的模型,难以适应复杂和动态的驾驶环境,导致次优的能耗-可靠性权衡。
核心思路:MAPS的核心思路是利用大型语言模型(LLM)的强大理解和预测能力,将LLM作为“地图阅读器协同驾驶员”,使其能够理解地图信息并预测车辆运行期间的关键参数。通过预测这些参数,MAPS可以动态地调整车辆的运行策略,从而在能耗和可靠性之间取得更好的平衡。
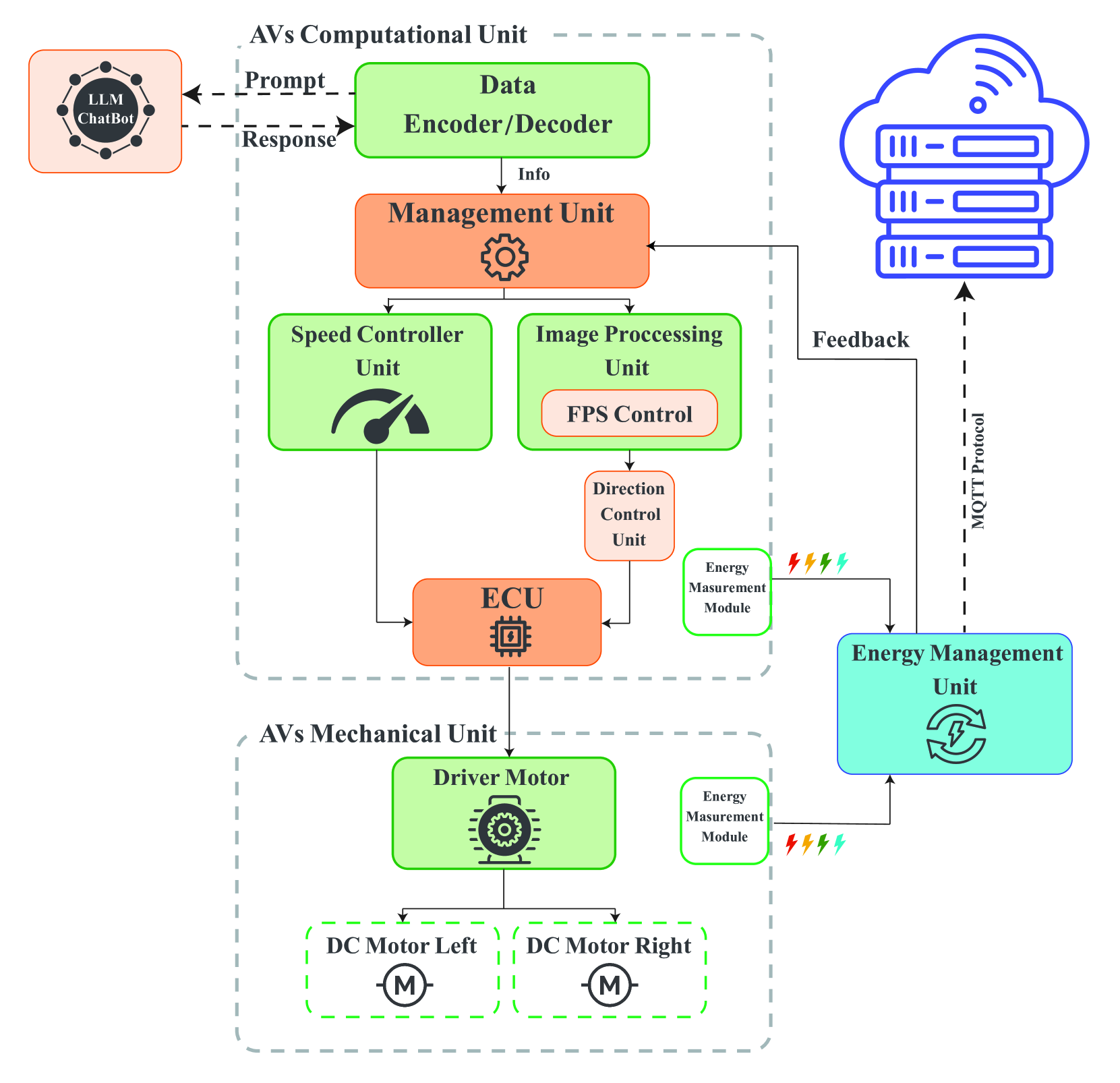
技术框架:MAPS方法包含以下主要模块:1) 地图信息输入模块:将地图数据输入到LLM中。2) LLM预测模块:LLM基于地图信息预测关键参数,例如速度、加速度、计算资源分配等。3) 决策模块:基于LLM的预测结果,决策模块调整车辆的运行策略,例如调整速度、优化计算资源分配等。4) 执行模块:执行决策模块的指令,控制车辆的运行。
关键创新:MAPS的关键创新在于将LLM引入到自动驾驶车辆的能耗-可靠性权衡管理中。与传统方法相比,MAPS能够更好地理解地图信息,并进行更准确的预测,从而实现更优的能耗-可靠性权衡。此外,MAPS还能够适应不同的驾驶环境和车辆状态,具有更强的鲁棒性。
关键设计:论文中未明确说明LLM的具体选择和训练细节,以及决策模块的具体算法。但可以推测,LLM的选择需要考虑其理解地图信息和进行预测的能力,决策模块需要根据LLM的预测结果,设计合理的优化目标和约束条件,以实现能耗和可靠性的平衡。损失函数和网络结构等技术细节未知。
🖼️ 关键图片
📊 实验亮点
MAPS方法在导航精度方面比最佳基线方法提高了20%。此外,MAPS还在计算单元中节省了11%的能源,在机械和计算单元中节省了高达54%的能源。这些实验结果表明,MAPS方法能够有效地平衡自动驾驶车辆的能耗和可靠性。
🎯 应用场景
MAPS方法可应用于各种自动驾驶车辆,包括乘用车、商用车和特种车辆。该方法能够提高自动驾驶车辆的能源效率,降低运营成本,并提高可靠性,从而增强安全性。此外,MAPS还可以应用于其他需要进行能耗-可靠性权衡的系统,例如机器人、无人机等。
📄 摘要(原文)
As autonomous vehicles become more prevalent, highly accurate and efficient systems are increasingly critical to improve safety, performance, and energy consumption. Efficient management of energy-reliability tradeoffs in these systems demands the ability to predict various conditions during vehicle operations. With the promising improvement of Large Language Models (LLMs) and the emergence of well-known models like ChatGPT, unique opportunities for autonomous vehicle-related predictions have been provided in recent years. This paper proposed MAPS using LLMs as map reader co-drivers to predict the vital parameters to set during the autonomous vehicle operation to balance the energy-reliability tradeoff. The MAPS method demonstrates a 20% improvement in navigation accuracy compared to the best baseline method. MAPS also shows 11% energy savings in computational units and up to 54% in both mechanical and computational units.