Restoration of Reduced Self-Efficacy Caused by Chronic Pain through Manipulated Sensory Discrepancy
作者: Matti Itkonen, Riku Kawabata, Satsuki Yamauchi, Shotaro Okajima, Hitoshi Hirata, Shingo Shimoda
分类: cs.RO
发布日期: 2024-09-10
期刊: Converging Clinical and Engineering Research on Neurorehabilitation V. ICNR 2024. Biosystems & Biorobotics, vol 31
DOI: 10.1007/978-3-031-77588-8_83
💡 一句话要点
提出基于感觉差异操控的方案,旨在恢复慢性疼痛患者的自我效能感。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 慢性疼痛 自我效能感 身体图式 感觉刺激操控 虚拟现实 机器人 康复治疗
📋 核心要点
- 慢性疼痛即使在损伤治愈后仍会降低患者的自我效能感,影响身体功能。
- 利用机器人操控和虚拟现实技术,通过操控感觉刺激来修改患者的身体图式。
- 该方法旨在恢复慢性疼痛患者丧失的自我效能感,改善其运动能力。
📝 摘要(中文)
人类的身体机能受自我效能感支配,即对自身运动能力的信念。在慢性疼痛患者中,即使引起疼痛的损伤已经治愈,这种能力也可能长期降低。慢性疼痛会改变身体图式,影响患者感知身体的维度和姿势。我们利用机器人操控技术和通过虚拟现实技术增强的感觉刺激来解决这个问题。我们提出了一种感觉刺激操控方法,旨在通过修改身体图式来恢复丧失的自我效能感。
🔬 方法详解
问题定义:该论文旨在解决慢性疼痛患者在损伤治愈后,自我效能感仍然降低的问题。现有方法缺乏有效手段来恢复患者对自身运动能力的信心,并且忽略了慢性疼痛对身体图式的影响。
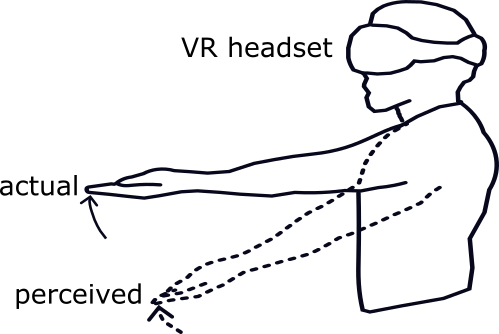
核心思路:论文的核心思路是通过操控患者的感觉输入,特别是视觉和触觉,来修正其扭曲的身体图式。通过机器人操控和虚拟现实技术,人为制造感觉差异,使患者在视觉上看到的动作与实际感受到的动作存在细微偏差,从而引导身体图式向更积极的方向调整。
技术框架:该方法主要包含以下几个阶段:1) 使用机器人系统精确控制患者肢体的运动;2) 通过虚拟现实技术提供增强的视觉反馈,例如,在VR环境中显示患者肢体的虚拟模型;3) 设计特定的感觉刺激操控方案,例如,轻微放大或缩小VR中肢体的运动幅度,或者引入轻微的延迟;4) 监测患者的自我效能感变化,并根据反馈调整操控方案。
关键创新:该论文的关键创新在于将感觉刺激操控与身体图式修正相结合,用于恢复慢性疼痛患者的自我效能感。与传统的康复方法相比,该方法更加注重对患者主观感觉的调控,并通过技术手段精确控制感觉输入,从而实现更有效的干预。
关键设计:具体的感觉刺激操控方案需要根据患者的个体情况进行调整。例如,对于运动幅度感知不足的患者,可以适当放大VR中肢体的运动幅度;对于存在运动恐惧的患者,可以引入轻微的延迟,使其感觉运动更加安全可控。此外,还需要设计合适的评估指标来量化患者的自我效能感变化,例如,使用问卷调查、运动测试等方法。
🖼️ 关键图片

📊 实验亮点
由于论文摘要未提供具体的实验结果,因此无法总结实验亮点。但从研究方法来看,该研究具有较高的创新性,有望为慢性疼痛患者的康复提供新的思路和方法。未来的研究可以关注不同感觉刺激操控方案的效果对比,以及长期干预的疗效评估。
🎯 应用场景
该研究成果可应用于慢性疼痛康复、中风后运动功能恢复、以及其他涉及身体图式障碍的疾病治疗。通过个性化的感觉刺激操控,有望帮助患者重塑对自身运动能力的信心,提高生活质量,并减少对药物的依赖。未来,该技术还可以与人工智能算法相结合,实现更智能化的康复方案。
📄 摘要(原文)
Human physical function is governed by self-efficacy, the belief in one's motor capacity. In chronic pain patients, this capacity may remain reduced long after the damage causing the pain has been cured. Chronic pain alters body schema, affecting how patients perceive the dimension and pose of their bodies. We exploit this deficit using robotic manipulation technology and augmented sensory stimuli through virtual reality technology. We propose a sensory stimuli manipulation method aimed at modifying body schema to restore lost self-efficacy.