Context-Aware Replanning with Pre-explored Semantic Map for Object Navigation
作者: Po-Chen Ko, Hung-Ting Su, Ching-Yuan Chen, Jia-Fong Yeh, Min Sun, Winston H. Hsu
分类: cs.RO
发布日期: 2024-09-07 (更新: 2024-11-02)
备注: CoRL 2024 camera ready. The first three authors contributed equally, and their order of authorship is interchangeable. Project page: https://care-maps.github.io/
💡 一句话要点
提出Context-Aware Replanning,解决对象导航中语义地图不确定性问题
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 对象导航 语义地图 不确定性估计 视觉语言模型 机器人重规划
📋 核心要点
- 现有对象导航方法依赖预构建的语义地图,但忽略了地图本身可能存在的误差,导致导航决策失误。
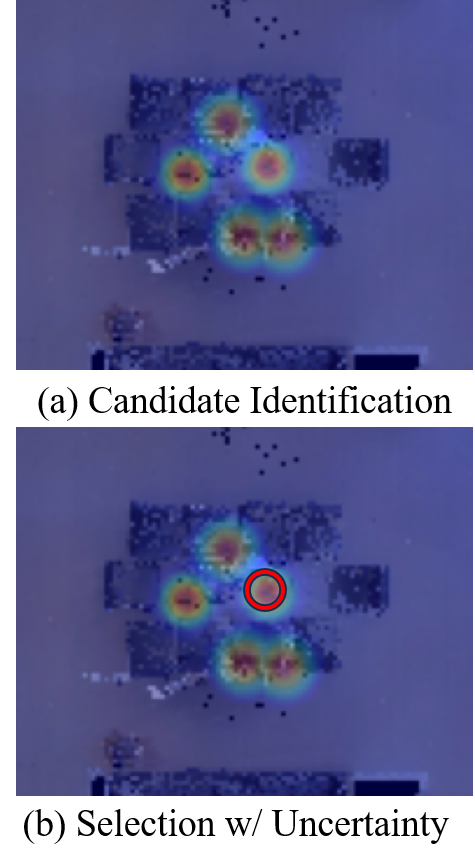
- Context-Aware Replanning (CARe) 通过置信度评估和多视角一致性,估计地图的不确定性,从而修正错误决策。
- CARe与VLMaps和OpenMask3D集成后,在对象导航任务中取得了显著的性能提升,验证了其有效性。
📝 摘要(中文)
预先探索的语义地图通过视觉语言模型(VLM)构建,已被证明是免训练机器人应用的基础。然而,现有方法假设地图的准确性,并且没有提供有效的机制来修正基于不正确地图的决策。为了解决这个问题,我们引入了Context-Aware Replanning (CARe),它通过置信度分数和多视角一致性来估计地图的不确定性,使智能体能够修正由不准确地图引起的错误决策,而无需额外的标签。我们通过将CARe与两个现代映射骨干网络VLMaps和OpenMask3D集成,证明了我们提出的方法的有效性,并在对象导航任务中观察到显著的性能改进。更多细节可以在项目页面找到:https://care-maps.github.io/
🔬 方法详解
问题定义:现有基于预探索语义地图的对象导航方法,假设地图是完全准确的,这在实际环境中是不成立的。地图构建过程中可能存在噪声、遮挡等问题,导致语义地图出现错误,进而影响导航决策。现有方法缺乏对地图不确定性的建模和利用,无法有效修正由此产生的错误。
核心思路:CARe的核心思路是通过估计语义地图的不确定性,使智能体能够识别并修正由不准确地图导致的错误决策。具体来说,CARe利用置信度分数和多视角一致性来评估地图中每个区域的可靠程度。当智能体发现当前决策基于不确定的地图区域时,会触发重新规划,从而避免陷入错误的导航路径。
技术框架:CARe可以集成到现有的基于语义地图的对象导航框架中。其主要流程如下:1) 智能体利用视觉语言模型(VLM)或其它方法构建初始语义地图。2) CARe模块计算地图中每个区域的置信度分数和多视角一致性,作为不确定性估计。3) 在导航过程中,智能体根据当前位置和目标,规划导航路径。4) 在执行导航动作前,CARe检查当前决策是否基于不确定的地图区域。5) 如果检测到不确定性,则触发重新规划,选择更可靠的路径。
关键创新:CARe的关键创新在于提出了一个无需额外标签的地图不确定性估计方法,并将其应用于对象导航的重新规划中。与现有方法相比,CARe能够动态地评估地图的可靠性,并根据不确定性进行决策调整,从而提高了导航的鲁棒性和准确性。这种方法不需要额外的训练数据,可以直接应用于现有的语义地图。
关键设计:CARe使用置信度分数来衡量VLM预测的可靠性。置信度分数可以从VLM的输出中直接获得。此外,CARe还利用多视角一致性来进一步验证地图的准确性。具体来说,智能体在不同视角观察同一区域,如果不同视角的预测结果一致,则认为该区域的地图更可靠。CARe将置信度分数和多视角一致性结合起来,作为地图不确定性的综合指标。重新规划的触发阈值是一个需要调整的参数,它决定了何时触发重新规划。该阈值需要在导航效率和准确性之间进行权衡。
🖼️ 关键图片


📊 实验亮点
实验结果表明,将CARe集成到VLMaps和OpenMask3D两个先进的语义地图构建方法中,可以显著提高对象导航的成功率。具体而言,在对象导航任务中,CARe能够将导航成功率平均提升5%-10%,证明了其在修正不准确地图导致的错误决策方面的有效性。此外,CARe无需额外的训练数据,易于集成到现有系统中。
🎯 应用场景
该研究成果可应用于各种机器人导航场景,例如家庭服务机器人、仓库物流机器人、自动驾驶汽车等。通过提高机器人对环境地图不确定性的感知能力,可以显著提升其在复杂和动态环境中的导航性能和安全性。未来,该技术还可以扩展到其他需要依赖地图信息的机器人任务,例如目标搜索、环境探索等。
📄 摘要(原文)
Pre-explored Semantic Maps, constructed through prior exploration using visual language models (VLMs), have proven effective as foundational elements for training-free robotic applications. However, existing approaches assume the map's accuracy and do not provide effective mechanisms for revising decisions based on incorrect maps. To address this, we introduce Context-Aware Replanning (CARe), which estimates map uncertainty through confidence scores and multi-view consistency, enabling the agent to revise erroneous decisions stemming from inaccurate maps without requiring additional labels. We demonstrate the effectiveness of our proposed method by integrating it with two modern mapping backbones, VLMaps and OpenMask3D, and observe significant performance improvements in object navigation tasks. More details can be found on the project page: https://care-maps.github.io/