1 Modular Parallel Manipulator for Long-Term Soft Robotic Data Collection
作者: Kiyn Chin, Carmel Majidi, Abhinav Gupta
分类: cs.RO, cs.LG
发布日期: 2024-09-05
💡 一句话要点
提出一种模块化并联软体机器人平台,用于长期软体机器人数据收集。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 软体机器人 并联机构 模块化设计 强化学习 数据收集
📋 核心要点
- 软体机器人领域缺乏鲁棒且灵活的硬件平台,难以支持长期实验和大规模数据收集,阻碍了机器学习的应用。
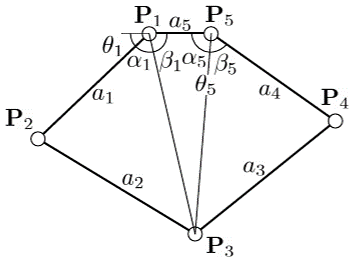
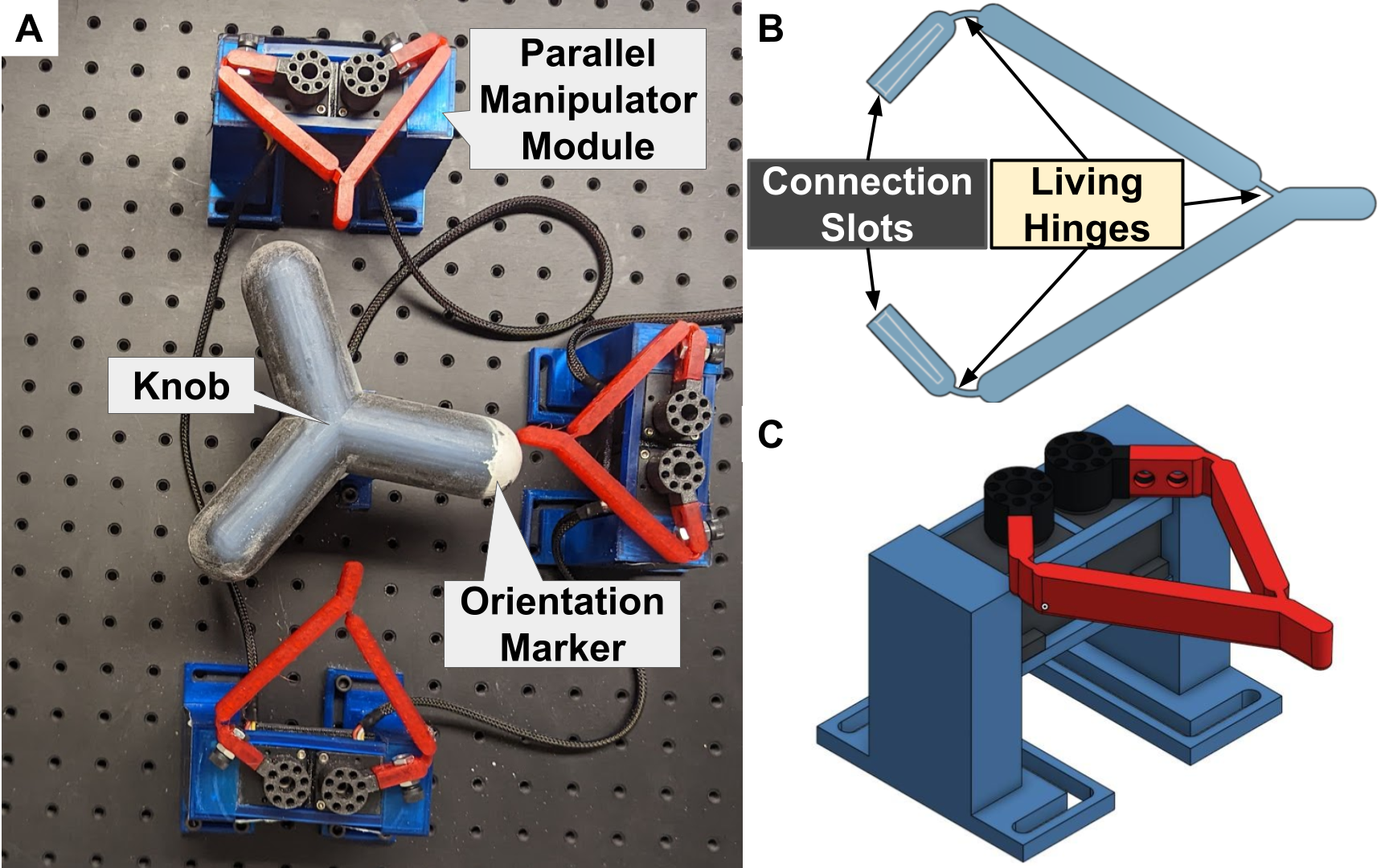
- 设计了一种模块化并联机器人平台,利用电机驱动柔顺的并联结构,实现对软体机构的精确控制和灵活配置。
- 通过2D操作任务验证了平台在策略梯度强化学习中的有效性,并展示了其与多个指爪的兼容性和可扩展性。
📝 摘要(中文)
本文提出了一种模块化并联机器人操作平台,适用于软体机器人领域的大规模数据收集和长期实验,并兼容各种软体机器人制造方法。考虑到刚性机器人系统中实现高速、高保真模拟以进行大规模数据收集的计算和理论难度,一个鲁棒的软体机器人硬件平台成为该领域高度优先的开发任务。该平台的模块由一对现成的电机驱动一个可定制的指爪组成,该指爪由柔顺的并联结构构成。由于电机能够完全驱动被动结构,指爪的并联机构可以简单到单个3D打印的聚氨酯或模制硅胶块状结构。这种设计灵活性允许实验使用具有不同几何形状、体积属性和表面属性的软机构。此外,虽然并联机构不需要单独的电子设备或其他部件,但可以包含这些部件,并且可以使用多功能软材料构建,以研究学习过程中兼容的软传感器和执行器。本文验证了该平台在基准2D操作任务中直接在硬件上用于策略梯度强化学习的能力。此外,我们还展示了与多个指爪的兼容性,并描述了兼容扩展的设计约束。
🔬 方法详解
问题定义:软体机器人领域需要进行长期实验和大规模数据收集,以便利用机器学习方法进行控制和优化。然而,现有的软体机器人硬件平台通常缺乏足够的鲁棒性和灵活性,难以满足这些需求。特别是,由于软体机器人的复杂力学特性,难以进行高保真、实时的仿真,因此需要一个可靠的硬件平台来直接进行实验和数据收集。
核心思路:本文的核心思路是设计一个模块化的并联机器人平台,该平台具有高度的灵活性和可定制性,能够适应不同的软体机器人机构和实验需求。通过使用现成的电机驱动柔顺的并联结构,可以实现对软体机构的精确控制,同时保持结构的简单性和可扩展性。这种设计避免了复杂的电子元件和额外的部件,降低了成本和维护难度。
技术框架:该平台由多个模块组成,每个模块包含一对电机和一个可定制的指爪。电机负责驱动指爪的运动,指爪采用并联结构,可以由3D打印或模制硅胶等材料制成。用户可以根据实验需求选择不同的指爪几何形状、材料属性和表面特性。此外,该平台还支持集成软传感器和执行器,以便研究兼容的软体机器人系统。整个平台可以通过软件进行控制,并可以用于各种操作任务和强化学习实验。
关键创新:该平台最重要的技术创新点在于其模块化和并联结构的设计。模块化设计使得平台具有高度的可扩展性和可定制性,可以根据不同的实验需求进行灵活配置。并联结构则保证了指爪的运动精度和稳定性,同时降低了结构的复杂性。此外,该平台还支持集成软传感器和执行器,为研究软体机器人的感知和控制提供了一个统一的平台。
关键设计:指爪的并联结构是该平台设计的关键。指爪可以由不同的材料制成,例如3D打印的聚氨酯或模制硅胶。电机的选择需要考虑其扭矩和速度,以满足指爪的运动需求。在强化学习实验中,使用了策略梯度算法来训练机器人的控制策略。奖励函数的设计需要根据具体的任务进行调整,以引导机器人学习到最优的控制策略。
🖼️ 关键图片

📊 实验亮点
该平台在2D操作任务中进行了验证,结果表明,通过策略梯度强化学习,机器人能够成功地学习到有效的控制策略。此外,实验还展示了该平台与多个指爪的兼容性,以及可扩展性。这些结果表明,该平台是一个有潜力的大规模软体机器人数据收集平台。
🎯 应用场景
该研究成果可应用于软体机器人的控制、感知和学习等领域。例如,可以利用该平台进行软体机器人的抓取、操作和导航等任务的研究。此外,该平台还可以用于开发新型的软体机器人传感器和执行器,以及研究软体机器人的生物力学特性。该平台有望推动软体机器人在医疗、制造和探索等领域的应用。
📄 摘要(原文)
Performing long-term experimentation or large-scale data collection for machine learning in the field of soft robotics is challenging, due to the hardware robustness and experimental flexibility required. In this work, we propose a modular parallel robotic manipulation platform suitable for such large-scale data collection and compatible with various soft-robotic fabrication methods. Considering the computational and theoretical difficulty of replicating the high-fidelity, faster-than-real-time simulations that enable large-scale data collection in rigid robotic systems, a robust soft-robotic hardware platform becomes a high priority development task for the field. The platform's modules consist of a pair of off-the-shelf electrical motors which actuate a customizable finger consisting of a compliant parallel structure. The parallel mechanism of the finger can be as simple as a single 3D-printed urethane or molded silicone bulk structure, due to the motors being able to fully actuate a passive structure. This design flexibility allows experimentation with soft mechanism varied geometries, bulk properties and surface properties. Additionally, while the parallel mechanism does not require separate electronics or additional parts, these can be included, and it can be constructed using multi-functional soft materials to study compatible soft sensors and actuators in the learning process. In this work, we validate the platform's ability to be used for policy gradient reinforcement learning directly on hardware in a benchmark 2D manipulation task. We additionally demonstrate compatibility with multiple fingers and characterize the design constraints for compatible extensions.