RoboTwin: Dual-Arm Robot Benchmark with Generative Digital Twins (early version)
作者: Yao Mu, Tianxing Chen, Shijia Peng, Zanxin Chen, Zeyu Gao, Yude Zou, Lunkai Lin, Zhiqiang Xie, Ping Luo
分类: cs.RO, cs.AI, cs.CL
发布日期: 2024-09-04 (更新: 2025-04-16)
备注: Project page: https://robotwin-benchmark.github.io/early-version/
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
RoboTwin:基于生成式数字孪生的双臂机器人基准测试平台
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 双臂机器人 数字孪生 生成式模型 大型语言模型 机器人基准测试 仿真到真实 机器人操作 空间关系推理
📋 核心要点
- 双臂机器人任务缺乏多样、高质量的演示数据和与真实世界对齐的评估基准,限制了其发展。
- RoboTwin利用生成式模型和大型语言模型构建数字孪生,生成多样化数据并提供真实环境对齐的评估。
- 实验表明,在RoboTwin上预训练并在真实数据上微调的模型,双臂和单臂任务成功率显著提升。
📝 摘要(中文)
本文提出RoboTwin,一个生成式数字孪生框架,旨在解决双臂机器人协调和复杂物体操作中,高质量演示数据和真实世界对齐的评估基准匮乏的问题。RoboTwin利用3D生成式基础模型和大型语言模型,生成多样化的专家数据集,并提供与真实世界对齐的评估平台。该框架从单张2D图像创建物体的数字孪生,生成逼真且可交互的场景。此外,引入了空间关系感知的代码生成框架,结合物体标注和大型语言模型,分解任务、确定空间约束并生成精确的机器人运动代码。RoboTwin提供包含模拟和真实世界数据的综合基准,实现标准化评估,并改善模拟训练与真实世界性能之间的一致性。在COBOT Magic Robot平台上验证了该方法,结果表明,在RoboTwin生成的数据上预训练并在少量真实世界样本上微调的模型,单臂任务成功率提高70%以上,双臂任务成功率提高40%以上,优于仅在真实世界数据上训练的模型。
🔬 方法详解
问题定义:现有双臂机器人研究面临数据匮乏和仿真环境与真实环境不一致的问题。缺乏足够数量和多样性的高质量演示数据,使得训练有效的控制策略变得困难。同时,仿真环境难以完全模拟真实世界的物理特性和复杂性,导致在仿真环境中训练的模型在真实机器人上的表现不佳。
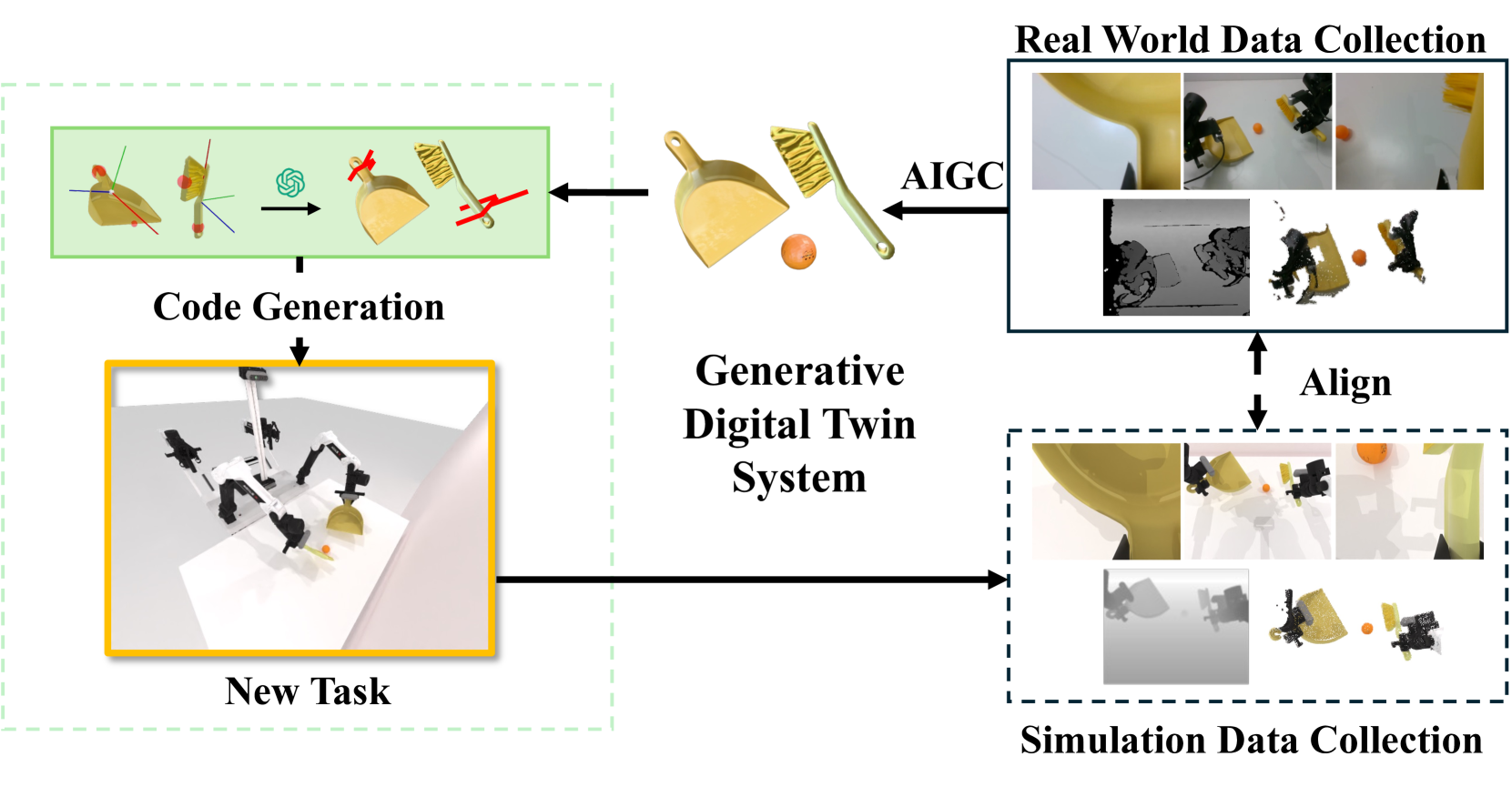
核心思路:RoboTwin的核心思路是利用生成式模型和大型语言模型,自动生成多样化的、与真实世界对齐的机器人操作场景和任务。通过构建数字孪生,模拟真实世界的物理交互,并利用大型语言模型进行任务分解和代码生成,从而降低数据收集的成本,并提高模型在真实环境中的泛化能力。
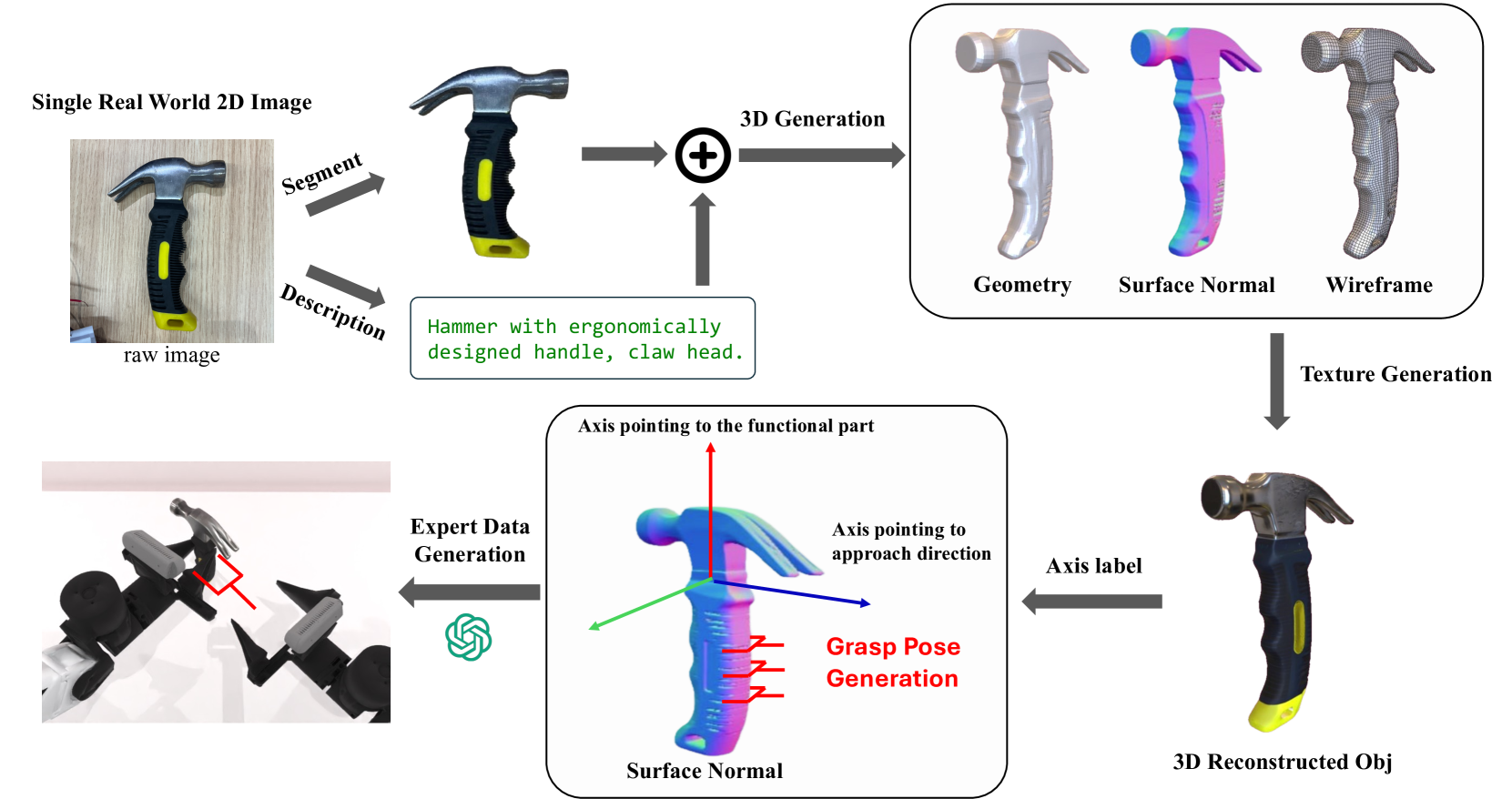
技术框架:RoboTwin框架包含以下几个主要模块:1) 基于2D图像的3D物体数字孪生生成模块,利用生成式模型从单张图像生成物体的3D模型;2) 场景生成模块,将生成的3D物体放置在虚拟环境中,并模拟真实世界的物理交互;3) 空间关系感知的代码生成模块,利用大型语言模型,结合物体标注和空间关系,自动生成机器人控制代码;4) 评估模块,在仿真和真实环境中评估机器人控制策略的性能。
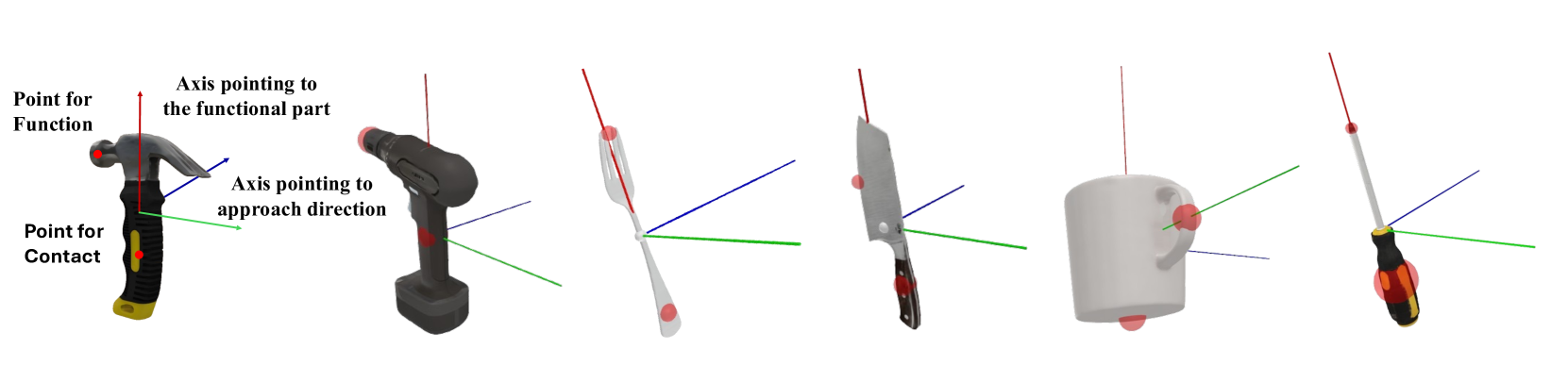
关键创新:RoboTwin的关键创新在于:1) 提出了一种基于生成式模型的数字孪生构建方法,能够从单张图像生成逼真的3D物体模型;2) 引入了空间关系感知的代码生成框架,能够利用大型语言模型自动生成机器人控制代码;3) 构建了一个包含模拟和真实世界数据的综合基准测试平台,能够实现标准化评估和仿真与真实环境之间的一致性。
关键设计:在3D物体生成模块中,使用了基于扩散模型的生成器,并引入了对抗训练机制,以提高生成模型的质量和逼真度。在代码生成模块中,使用了预训练的大型语言模型,并针对机器人操作任务进行了微调。在评估模块中,设计了一系列标准化的评估指标,包括成功率、执行时间等。
🖼️ 关键图片
📊 实验亮点
实验结果表明,在RoboTwin生成的数据上预训练并在少量真实世界样本上微调的模型,在单臂任务上的成功率提高了70%以上,在双臂任务上的成功率提高了40%以上,显著优于仅在真实世界数据上训练的模型。这验证了RoboTwin在提升机器人控制策略性能方面的有效性,并表明其具有良好的仿真到真实的迁移能力。
🎯 应用场景
RoboTwin可应用于各种需要双臂机器人协调操作的场景,例如智能制造、仓储物流、医疗手术等。通过提供高质量的训练数据和真实环境对齐的评估基准,加速双臂机器人技术的研发和应用,提升自动化水平和生产效率。未来,该框架可扩展到更多类型的机器人和更复杂的任务。
📄 摘要(原文)
In the rapidly advancing field of robotics, dual-arm coordination and complex object manipulation are essential capabilities for developing advanced autonomous systems. However, the scarcity of diverse, high-quality demonstration data and real-world-aligned evaluation benchmarks severely limits such development. To address this, we introduce RoboTwin, a generative digital twin framework that uses 3D generative foundation models and large language models to produce diverse expert datasets and provide a real-world-aligned evaluation platform for dual-arm robotic tasks. Specifically, RoboTwin creates varied digital twins of objects from single 2D images, generating realistic and interactive scenarios. It also introduces a spatial relation-aware code generation framework that combines object annotations with large language models to break down tasks, determine spatial constraints, and generate precise robotic movement code. Our framework offers a comprehensive benchmark with both simulated and real-world data, enabling standardized evaluation and better alignment between simulated training and real-world performance. We validated our approach using the open-source COBOT Magic Robot platform. Policies pre-trained on RoboTwin-generated data and fine-tuned with limited real-world samples improve the success rate of over 70% for single-arm tasks and over 40% for dual-arm tasks compared to models trained solely on real-world data. This significant improvement demonstrates RoboTwin's potential to enhance the development and evaluation of dual-arm robotic manipulation systems. Project Page: https://robotwin-benchmark.github.io/early-version/.