Robust Vehicle Localization and Tracking in Rain using Street Maps
作者: Yu Xiang Tan, Malika Meghjani
分类: cs.RO, cs.AI, cs.CV
发布日期: 2024-09-02
期刊: IEEE International Conference on Intelligent Transportation Systems, 2024
💡 一句话要点
提出Map-Fusion算法,融合地图信息,提升雨天等恶劣环境下车辆定位与跟踪的鲁棒性。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 车辆定位 视觉里程计 地图融合 恶劣天气 传感器融合
📋 核心要点
- 现有基于GPS的车辆定位在隧道和城市密集区域不稳定,视觉里程计在恶劣天气下易受遮挡和模糊影响。
- Map-Fusion算法融合间歇性GPS、漂移IMU、视觉里程计和2D地图信息,校正定位漂移,提升鲁棒性。
- 实验表明,Map-Fusion算法在不同数据集上降低了现有VO和VIO方法的误差,并在真实环境中验证了有效性。
📝 摘要(中文)
本文提出了一种新的车辆定位方法,该方法利用基于街道网络的地图信息来校正漂移的里程计估计和间歇性的GPS测量,尤其是在雨天和隧道等不利场景中。具体而言,该方法是一种灵活的融合算法,集成了间歇性GPS、漂移的IMU和VO估计以及2D地图信息,以实现稳健的车辆定位和跟踪。我们将该方法称为Map-Fusion。我们在来自不同国家的四个地理位置不同的数据集上,在晴朗和雨天等不同天气条件下对我们提出的方法进行了稳健的评估。这些数据集还包括隧道和地下通道中具有挑战性的视觉片段。结果表明,通过集成地图信息,我们的Map-Fusion算法降低了所有数据集中最先进的VO和VIO方法的误差。我们还在真实环境中以及在硬件受限的移动机器人上实时验证了我们提出的算法。Map-Fusion在150米的路线中,在晴朗天气下实现了2.46米的误差,在雨天实现了6.05米的误差。
🔬 方法详解
问题定义:论文旨在解决在恶劣天气(如雨天)和复杂环境(如隧道)中,车辆定位和跟踪精度下降的问题。现有的GPS定位在隧道和城市峡谷中信号不稳定,视觉里程计(VO)和视觉惯性里程计(VIO)在雨天等恶劣天气下,由于图像模糊和遮挡,性能显著下降。因此,如何在这些挑战性场景下实现鲁棒且精确的车辆定位是本研究要解决的核心问题。
核心思路:论文的核心思路是利用先验的地图信息来约束和校正里程计的漂移。通过将来自GPS、IMU和VO/VIO的定位信息与高精度的2D地图信息进行融合,可以有效地减少定位误差,提高定位的鲁棒性。这种融合策略的关键在于充分利用了地图提供的全局约束,从而克服了传感器自身局限性带来的误差累积。
技术框架:Map-Fusion算法的整体框架包含以下几个主要模块:1) 数据采集模块:负责从GPS、IMU和VO/VIO传感器获取定位和姿态信息。2) 地图匹配模块:将传感器数据与2D地图进行匹配,确定车辆在地图上的大致位置。3) 状态估计模块:利用卡尔曼滤波或粒子滤波等方法,融合来自传感器和地图的信息,估计车辆的精确位置和姿态。4) 优化模块:对状态估计的结果进行优化,进一步提高定位精度。整个流程是一个闭环反馈系统,不断地利用新的传感器数据和地图信息来更新车辆的状态估计。
关键创新:该论文的关键创新在于将地图信息有效地融入到车辆定位和跟踪过程中。与传统的纯传感器融合方法相比,Map-Fusion算法能够利用地图提供的全局约束,显著提高定位的鲁棒性和精度,尤其是在恶劣天气和复杂环境中。此外,该算法还具有较强的灵活性,可以根据不同的应用场景和传感器配置进行调整和优化。
关键设计:Map-Fusion算法的关键设计包括:1) 地图匹配算法:采用高效的地图匹配算法,快速确定车辆在地图上的大致位置。2) 融合策略:设计合理的融合策略,平衡来自不同传感器和地图的信息,避免过度依赖某个传感器或地图信息。3) 状态估计方法:选择合适的状态估计方法,如扩展卡尔曼滤波(EKF)或粒子滤波(PF),对车辆的状态进行精确估计。4) 参数优化:通过实验和仿真,优化算法中的关键参数,如传感器噪声模型、地图匹配阈值等,以达到最佳的定位性能。
🖼️ 关键图片


📊 实验亮点
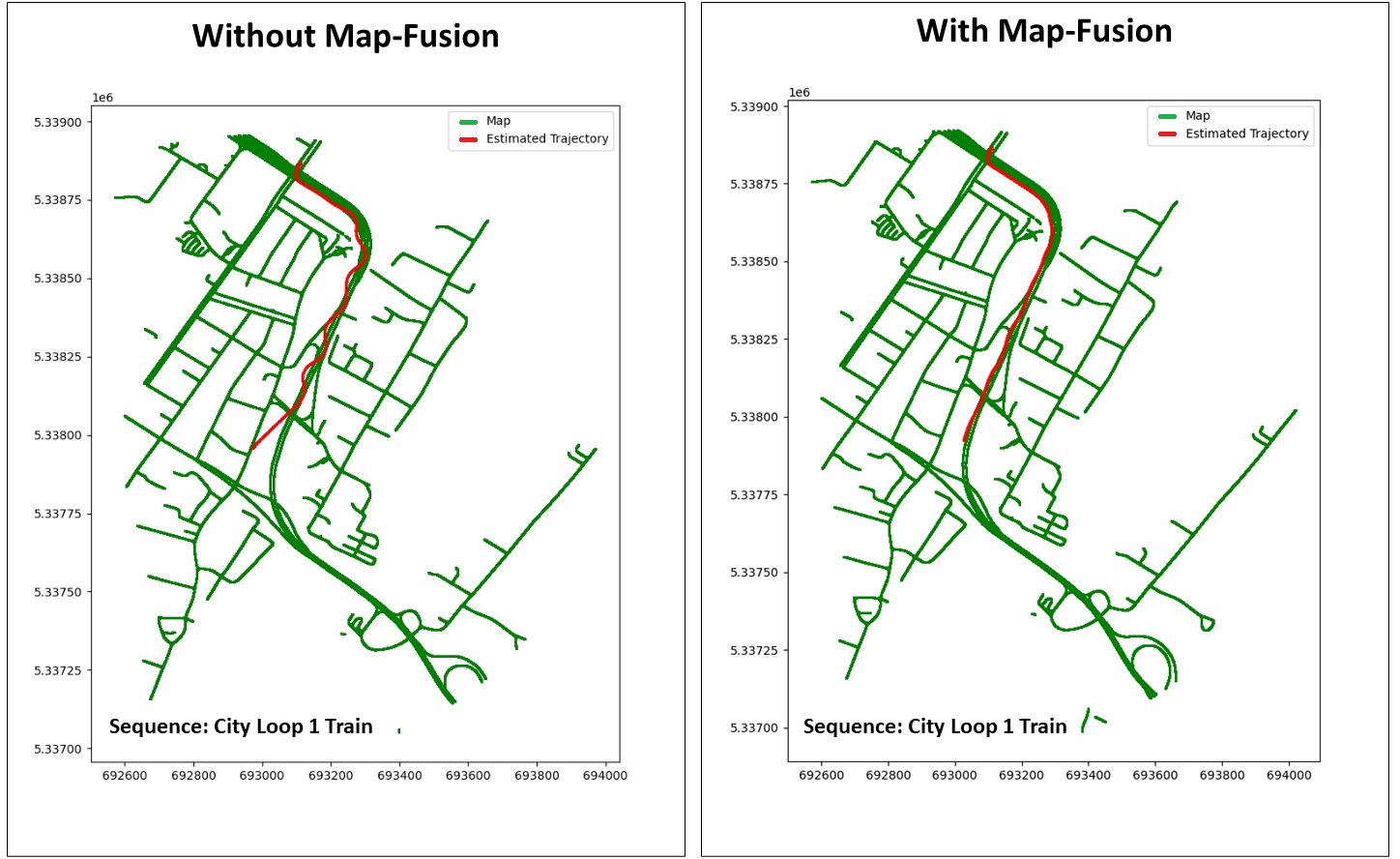
实验结果表明,Map-Fusion算法在不同数据集上均优于现有的VO和VIO方法。在真实环境中,Map-Fusion算法在晴朗天气下实现了2.46米的定位误差,在雨天实现了6.05米的定位误差。相较于未融合地图信息的定位方法,Map-Fusion算法在恶劣天气下的定位精度提升显著。
🎯 应用场景
该研究成果可广泛应用于自动驾驶、智能交通、机器人导航等领域。在恶劣天气或复杂城市环境中,能够提供更可靠的车辆定位和跟踪,提高自动驾驶系统的安全性和可靠性。此外,该技术还可用于室内导航、物流配送等场景,具有重要的实际应用价值和广阔的市场前景。
📄 摘要(原文)
GPS-based vehicle localization and tracking suffers from unstable positional information commonly experienced in tunnel segments and in dense urban areas. Also, both Visual Odometry (VO) and Visual Inertial Odometry (VIO) are susceptible to adverse weather conditions that causes occlusions or blur on the visual input. In this paper, we propose a novel approach for vehicle localization that uses street network based map information to correct drifting odometry estimates and intermittent GPS measurements especially, in adversarial scenarios such as driving in rain and tunnels. Specifically, our approach is a flexible fusion algorithm that integrates intermittent GPS, drifting IMU and VO estimates together with 2D map information for robust vehicle localization and tracking. We refer to our approach as Map-Fusion. We robustly evaluate our proposed approach on four geographically diverse datasets from different countries ranging across clear and rain weather conditions. These datasets also include challenging visual segments in tunnels and underpasses. We show that with the integration of the map information, our Map-Fusion algorithm reduces the error of the state-of-the-art VO and VIO approaches across all datasets. We also validate our proposed algorithm in a real-world environment and in real-time on a hardware constrained mobile robot. Map-Fusion achieved 2.46m error in clear weather and 6.05m error in rain weather for a 150m route.