Non-verbal Interaction and Interface with a Quadruped Robot using Body and Hand Gestures: Design and User Experience Evaluation
作者: Soohyun Shin, Trevor Evetts, Hunter Saylor, Hyunji Kim, Soojin Woo, Wonhwha Rhee, Seong-Woo Kim
分类: cs.RO
发布日期: 2024-08-30
备注: 16 pages
💡 一句话要点
探索四足机器人非言语交互:对比身体与手势控制的用户体验
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 人机交互 非言语交互 手势控制 用户体验评估
📋 核心要点
- 现有四足机器人交互方式依赖外部设备或语音,不够直观自然,限制了其在复杂环境中的应用。
- 该研究探索了基于身体和手势的非言语交互方式,旨在提升用户与四足机器人交互的舒适性和效率。
- 实验结果表明,用户更偏好身体手势控制,且能获得更高的满意度和更快的任务完成速度。
📝 摘要(中文)
近年来,四足机器人在崎岖地形和爬楼梯等场景中展现出卓越的机动性,备受关注。随着这些机器人日益融入建筑和医疗等行业,研究人员越来越重视开发直观的交互方式,如语音和手势,以取代键盘或操纵杆等外部设备。本文旨在研究一种舒适且高效的四足机器人交互方法。为此,我们进行了两项初步研究,观察人们在自然和受控环境中与四足机器人的自然交互方式。随后,我们进行了一项原型实验,使用Unitree Go1 Pro四足机器人,考察了人体和手势控制的人机偏好。我们使用用户体验问卷评估了13名参与者的用户体验,并测量了完成特定任务所需的时间。初步结果表明,与语音相比,人类更倾向于通过手势与机器人进行交流。此外,参与者在使用身体手势与机器人交互时,报告了更高的满意度,并且完成任务的速度更快。这与大多数四足机器人手势控制技术以手势为主的现状相悖。
🔬 方法详解
问题定义:现有四足机器人的控制方式,如键盘、操纵杆或语音,存在操作复杂、不够直观、易受环境噪声干扰等问题。尤其是在建筑、医疗等复杂环境中,这些控制方式难以满足高效、便捷的交互需求。因此,需要探索更自然、直观的交互方式,提升用户体验。
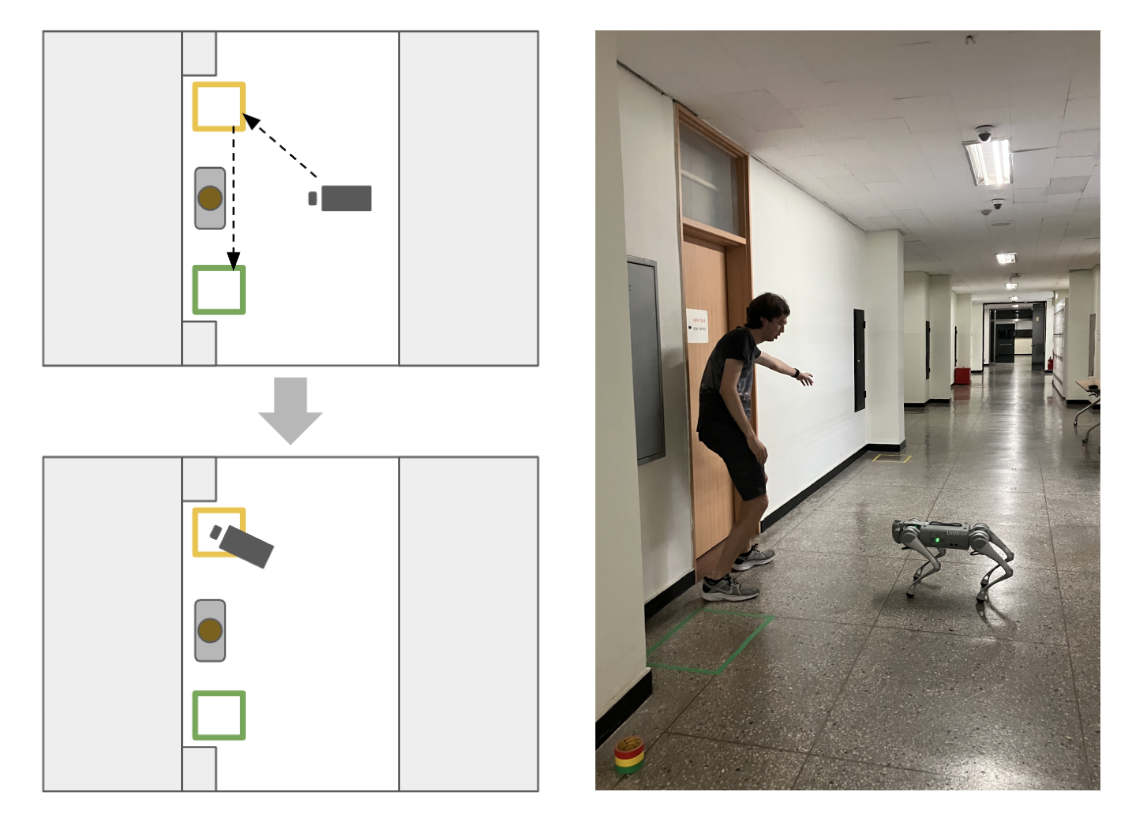
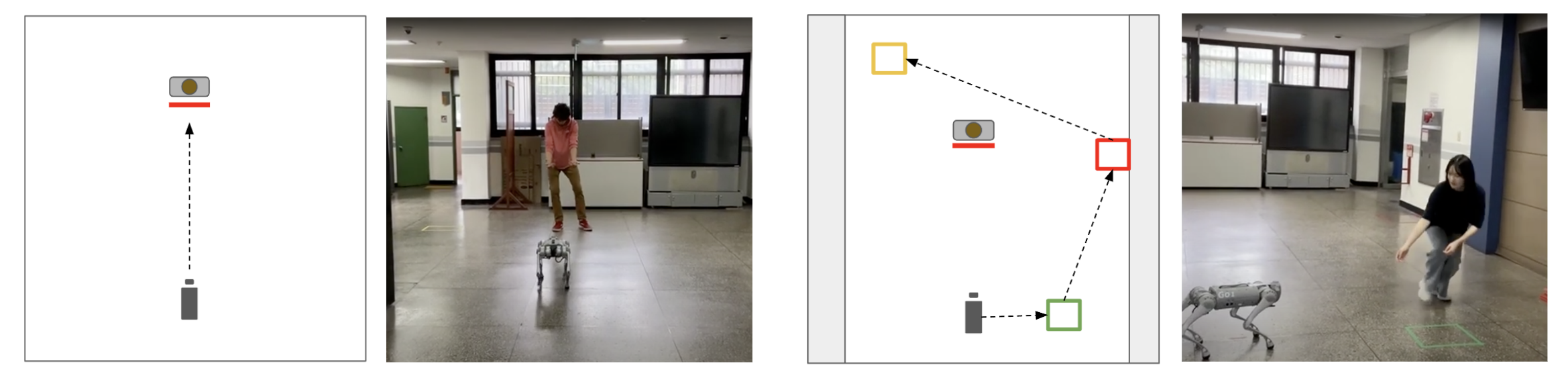
核心思路:该论文的核心思路是研究基于身体和手势的非言语交互方式,并对比身体手势和手部手势在四足机器人控制中的用户体验。通过观察人们与四足机器人的自然交互方式,并结合用户体验评估,找到更符合人类直觉、更高效的交互模式。
技术框架:该研究的技术框架主要包括以下几个阶段:1)初步观察研究:在自然和受控环境中观察人们与四足机器人的交互行为,收集数据;2)原型系统开发:基于Unitree Go1 Pro四足机器人,实现基于身体和手势的控制原型系统;3)用户体验评估:招募参与者,使用用户体验问卷(User Experience Questionnaire)和任务完成时间等指标,评估不同交互方式的用户体验;4)数据分析:分析收集到的数据,对比不同交互方式的优劣,得出结论。
关键创新:该研究的关键创新在于:1)对比了身体手势和手部手势在四足机器人控制中的用户体验,发现用户更偏好身体手势控制;2)基于用户体验数据,为四足机器人非言语交互方式的设计提供了新的思路和方向,挑战了当前以手部手势为主流的趋势。
关键设计:研究中,身体手势和手部手势的具体定义和映射关系是关键设计。论文中并未详细描述具体的手势定义,但提到通过初步观察研究来确定手势。用户体验问卷的设计也至关重要,需要涵盖用户满意度、易用性、效率等多个维度。此外,任务的设计也需要具有代表性,能够有效区分不同交互方式的优劣。
🖼️ 关键图片

📊 实验亮点
实验结果表明,用户在使用身体手势控制四足机器人时,报告了更高的满意度,并且完成任务的速度更快。这一发现与当前大多数四足机器人手势控制技术以手势为主的现状相悖,为未来的四足机器人交互设计提供了新的方向。具体的用户体验问卷得分和任务完成时间数据未在摘要中给出,需查阅原文。
🎯 应用场景
该研究成果可应用于建筑、医疗、安防等领域,提升四足机器人在复杂环境中的作业效率和安全性。例如,在建筑工地,工人可以通过身体手势控制机器人进行材料搬运和巡检;在医疗领域,医护人员可以通过手势控制机器人进行远程查房和物资配送。未来,该研究可进一步拓展到其他类型的机器人,实现更自然、智能的人机协作。
📄 摘要(原文)
In recent years, quadruped robots have attracted significant attention due to their practical advantages in maneuverability, particularly when navigating rough terrain and climbing stairs. As these robots become more integrated into various industries, including construction and healthcare, researchers have increasingly focused on developing intuitive interaction methods such as speech and gestures that do not require separate devices such as keyboards or joysticks. This paper aims at investigating a comfortable and efficient interaction method with quadruped robots that possess a familiar form factor. To this end, we conducted two preliminary studies to observe how individuals naturally interact with a quadruped robot in natural and controlled settings, followed by a prototype experiment to examine human preferences for body-based and hand-based gesture controls using a Unitree Go1 Pro quadruped robot. We assessed the user experience of 13 participants using the User Experience Questionnaire and measured the time taken to complete specific tasks. The findings of our preliminary results indicate that humans have a natural preference for communicating with robots through hand and body gestures rather than speech. In addition, participants reported higher satisfaction and completed tasks more quickly when using body gestures to interact with the robot. This contradicts the fact that most gesture-based control technologies for quadruped robots are hand-based. The video is available at https://youtu.be/rysv1p1zvp4.