Time-Optimized Trajectory Planning for Non-Prehensile Object Transportation in 3D
作者: Lingyun Chen, Haoyu Yu, Abdeldjallil Naceri, Abdalla Swikir, Sami Haddadin
分类: cs.RO
发布日期: 2024-08-29
备注: Accepted to the European Robotic Forum (ERF) 2024
💡 一句话要点
提出一种3D空间非抓取物体运输的时间优化轨迹规划方法,提升运输速度。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非抓取运输 轨迹规划 时间优化 物体稳定性 机器人运动约束
📋 核心要点
- 非抓取物体运输在机器人操作中具有优势,尤其是在处理不稳定物体时,但现有方法难以兼顾机器人运动约束和物体稳定性。
- 本文提出一种基于物理模型的轨迹规划方法,通过优化托盘旋转,在保证物体稳定性的前提下,提升非抓取运输的速度。
- 实验结果表明,该方法在7自由度Franka Panda机器人上验证有效,能够在满足约束条件下提高运输速度。
📝 摘要(中文)
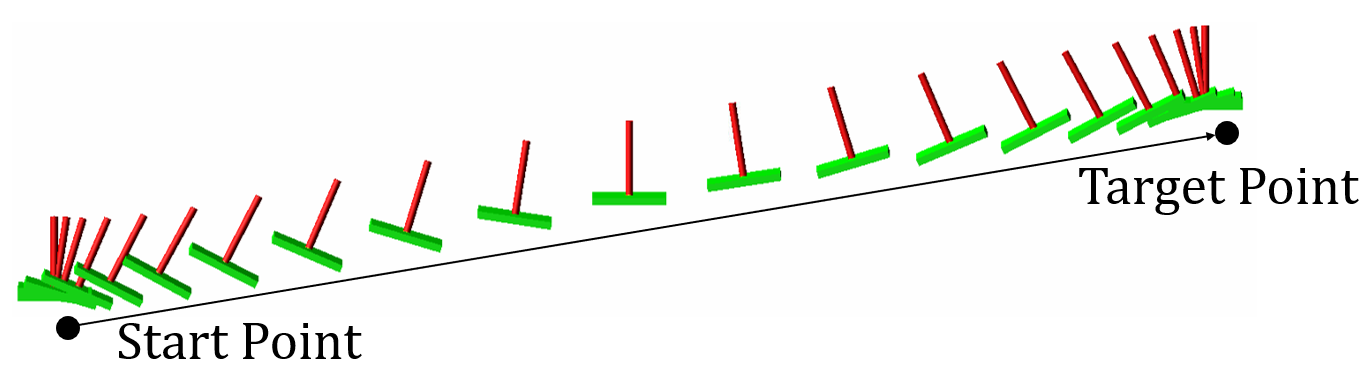
本文提出了一种针对3D空间中非抓取物体运输的时间优化轨迹规划方法。该方法旨在提升机器人操作物体(特别是易碎物体)时的性能。有效的轨迹规划需要同时考虑机器人运动约束和物体稳定性。本文引入了一个用于物体稳定性的物理模型,并提出了一种新颖的轨迹规划方法,用于沿3D空间中任意直线进行非抓取运输。通过在7自由度Franka Panda机器人上的验证,证实了该方法可以通过集成托盘旋转来提高运输速度,同时确保物体稳定性和机器人运动约束。
🔬 方法详解
问题定义:现有的非抓取物体运输方法在轨迹规划时,难以同时兼顾机器人自身的运动约束(如关节速度、加速度限制)和被运输物体的稳定性。尤其是在3D空间中,物体更容易倾倒,使得轨迹规划更加复杂。因此,需要一种能够同时考虑这些因素,并优化运输时间的轨迹规划方法。
核心思路:本文的核心思路是利用托盘的旋转来辅助物体运输,通过优化托盘的旋转轨迹,可以在保证物体稳定性的前提下,提高运输速度。同时,该方法需要考虑机器人自身的运动学和动力学约束,以确保轨迹的可执行性。
技术框架:该方法主要包含以下几个阶段:1) 建立物体稳定性的物理模型,该模型描述了物体在托盘上运动时,保持稳定所需的条件。2) 基于该模型,设计轨迹规划器,该规划器能够生成满足物体稳定性约束和机器人运动约束的轨迹。3) 优化轨迹,以最小化运输时间。该优化过程通常采用数值优化方法。
关键创新:本文的关键创新在于将托盘旋转集成到轨迹规划中,并提出了一种能够同时考虑物体稳定性和机器人运动约束的优化方法。与传统的只考虑平动的轨迹规划方法相比,该方法能够更有效地利用机器人的运动能力,从而提高运输速度。
关键设计:在物体稳定性模型方面,需要考虑物体的质量、重心位置、摩擦系数等参数。在轨迹规划器设计方面,需要选择合适的轨迹表示方法(如多项式、B样条等),并设计合适的约束条件和目标函数。在优化算法选择方面,需要根据问题的特点选择合适的数值优化算法(如序列二次规划SQP等)。
🖼️ 关键图片


📊 实验亮点
实验结果表明,所提出的轨迹规划方法能够在7自由度Franka Panda机器人上成功实现非抓取物体运输。通过集成托盘旋转,运输速度得到了显著提高,同时确保了物体的稳定性和机器人的运动约束。具体的性能数据(如运输时间缩短的百分比)未知,但摘要明确指出“improved transportation speed via tray rotation integration”。
🎯 应用场景
该研究成果可应用于各种需要非抓取物体运输的场景,例如:在仓库中运输易碎物品,在医疗环境中运输生物样本,在太空环境中运输精密仪器等。通过提高运输速度和稳定性,可以显著提高工作效率和安全性,降低操作风险。未来,该方法可以进一步扩展到更复杂的物体形状和运动场景。
📄 摘要(原文)
Non-prehensile object transportation offers a way to enhance robotic performance in object manipulation tasks, especially with unstable objects. Effective trajectory planning requires simultaneous consideration of robot motion constraints and object stability. Here, we introduce a physical model for object stability and propose a novel trajectory planning approach for non-prehensile transportation along arbitrary straight lines in 3D space. Validation with a 7-DoF Franka Panda robot confirms improved transportation speed via tray rotation integration while ensuring object stability and robot motion constraints.